

Intelligent systems, ambient robot and service (SIRIUS)
Thématiques :
Assistance cognitiveAssistance physique
Reconnaissance d’activités
Responsables :
Yacine AMIRATSamer MOHAMMED
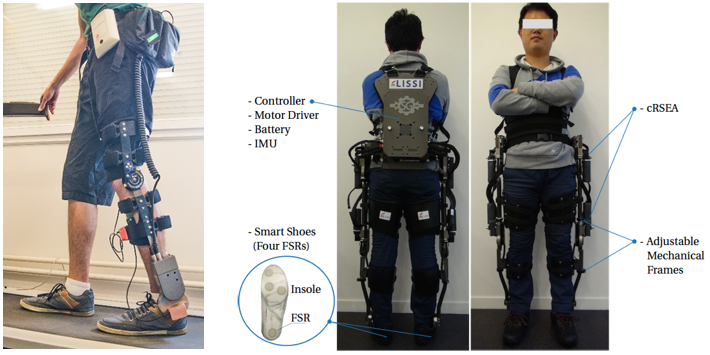
Le premier thème porte sur les systèmes robotiques portables ou exosquelettes. Ces derniers peuvent être utilisés comme dispositifs d’aide à la mobilité pour augmenter les capacités motrices d’un sujet pendant la réalisation des tâches de la vie quotidienne ou comme auxiliaires de rééducation neuromotrice de sujets parétiques. Les problématiques traitées concernent principalement le développement, la modélisation et la commande de ces robots en s’attaquant à des challenges scientifiques importants comme la prise en compte de la complexité du système locomoteur humain, l’estimation de l’intention de mouvement du sujet, la maximisation de la transparence de l’exosquelette pour préserver les mouvements naturels du sujet, et enfin la sécurité de ce dernier.
Le second thème qui concerne l’analyse d’activités et la reconnaissance du contexte de l’humain est abordé selon deux volets : (i) l’analyse d’activités physiques, au sens de l’analyse du mouvement, dans le contexte du diagnostic et du suivi de la maladie de Parkinson : analyse de l’équilibre postural et analyse du cycle de marche ; (ii) la reconnaissance des activités quotidiennes et plus largement du contexte de l’utilisateur en vue de fournir, via des robots compagnons physiques ou virtuels, divers services d’assistance visant à améliorer sa qualité de vie et son bien-être. Les travaux de l’équipe dans ce thème sont centrées autour du développement d’approches orientées données à base d’apprentissage machine, d’approches orientées connaissances (approches sémantiques) et de modèles hybrides (orientées données et connaissances).
| Nom | Courriel | Poste |
|---|---|---|
| Anis Chawki ABBES | anis.abbes@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
| Mohamed ADJEL | mohamed.adjel@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
| Nawras ALHELI | Doctorant | |
| Yacine AMIRAT | amirat@-Code a retirer pour éviter le SPAM-u-pec.fr | Professeur |
| Ferhat ATTAL | ferhat.attal@-Code a retirer pour éviter le SPAM-u-pec.fr | Maître de conférences |
| Filip BECANOVIC | filip.becanovic@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
| Réda BELAICHE | reda.belaiche@-Code a retirer pour éviter le SPAM-u-pec.fr | Chercheur |
| Oussama BEY | oussama.bey@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
| Wanxin CHEN | wanxin.chen@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
| Abdelghani CHIBANI | chibani@-Code a retirer pour éviter le SPAM-lissi.fr | Maître de conférences |
| Éric DELéCHELLE | eric.delechelle@-Code a retirer pour éviter le SPAM-u-pec.fr | Maître de conférences |
| Karim DJOUANI | djouani@-Code a retirer pour éviter le SPAM-u-pec.fr | Professeur |
| Georges FRIED | fried@-Code a retirer pour éviter le SPAM-u-pec.fr | Maître de conférences |
| Yahaya IDRIS | yahaya.idris-abubakar@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
| Ghazaleh KHODABANDELOU | ghazaleh.khodabandelou@-Code a retirer pour éviter le SPAM-u-pec.fr | Maître de conférences |
| Tarek MADANI | tarek.madani@-Code a retirer pour éviter le SPAM-u-pec.fr | Maître de conférences |
| Samer MOHAMMED | samer.mohammed@-Code a retirer pour éviter le SPAM-u-pec.fr | Maître de conférences |
| Hala RIFAï | hala.rifai@-Code a retirer pour éviter le SPAM-u-pec.fr | Maître de conférences |
| Antonie SMITH | antonie.smith@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
| Farnaz SOLEIMANI | farnaz.soleimani@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
| Hazar ZILELIOGLU | hazar.zilelioglu@-Code a retirer pour éviter le SPAM-u-pec.fr | Doctorant |
Total: 367
Article dans une revue (JCR) : 143
2026
- ref_biblio
- . Be\v Canovi\'c, "Inverse optimal control of muscle force sharing during pathological gait," Journal of Biomechanics, vol. 201, pp. 113256, May. 2026. <10.1016/j.jbiomech.2026.113256>. <hal-05562371>.
- ref_biblio
- O. Bey, H. Rifai, A. Chemori, Y. Amirat, and S. Mohammed, "Finite-time Adaptive FeedForward Fractional-order RISE $\alpha$ Control of an Actuated Ankle-Foot Orthosis," IEEE Transactions on Automation Science and Engineering, pp. 1-1, Mar. 2026. <10.1109/TASE.2026.3668272>. <lirmm-05557004>.

2025
- ref_biblio
- N. Atmani, M. E. Khanouche, A. Belaid, Y. Amirat, and A. Chibani, "Machine learning-based reduction and unbiased reinforcement learning method for QoS-aware services composition in IoT environments," Computing, vol. 107, no. 5, pp. 127, May. 2025. <10.1007/s00607-025-01481-4>. <hal-05545012>.
2024
- ref_biblio
- R. Jradi, H. Rifaï, and S. Mohammed, "Adaptive Active Disturbance Rejection Control of an Actuated Ankle Foot Orthosis for Ankle Movement Assistance," IEEE Robotics and Automation Letters, vol. 9, no. 1, pp. 367-374, Jan. 2024. <10.1109/LRA.2023.3333739>. <hal-04326567>.
2023
- ref_biblio
- A. Cherifi, M. E. Khanouche, Y. Amirat, and Z. Farah, "A parallel approach for user-centered QoS-aware services composition in the Internet of Things," Engineering Applications of Artificial Intelligence, vol. 123, pp. 106277, Aug. 2023. <10.1016/j.engappai.2023.106277>. <hal-04326583>.
- ref_biblio
- B. Bendjemil, K. Safi, I. Kouahla, J. G. Noudem, M. Mouyane, J. Bernard, Y. Guhel, and D. Houivet, "Nanocomposite Beta Nb50Ti based SWCNTs by FAST-SPS-FCT," Experimental and Theoretical Nanotechnology, pp. 1-32, Jan. 2023. <10.56053/7.1.1>. <hal-04408059>.
- ref_biblio
- E. Pignaton De Freitas, J. I. Olszewska, J. L. Carbonera, S. Fiorini, A. Khamis, S. V. Ragavan, M. Barreto, E. Prestes, M. Habib, S. Redfield, A. Chibani, P. Goncalves, J. Bermejo-Alonso, R. Sanz, E. Tosello, A. Olivares-Alarcos, A. A. Konzen, J. Quintas, and H. Li, "Ontological concepts for information sharing in cloud robotics," Journal of Ambient Intelligence and Humanized Computing, vol. 14, no. 5, pp. 4921-4932, 2023. <10.1007/s12652-020-02150-4>. <hal-04326579>.
- ref_biblio
- F. Becanovic, V. Bonnet, R. Dumas, K. Jovanovic, and S. Mohammed, "Force Sharing Problem During Gait Using Inverse Optimal Control," IEEE Robotics and Automation Letters, vol. 8, no. 2, pp. 872-879, Jan. 2023. <10.1109/LRA.2022.3217398>. <hal-03953527>.
- ref_biblio
- G. Khodabandelou, A. Chibani, Y. Amirat, and S. Tanimoto, "A Recurrent Neural Network Optimization Method for Anticipation of Hierarchical Human Activity," IEEE Transactions on Automation Science and Engineering, pp. 1-17, 2023. <10.1109/TASE.2023.3300821>. <hal-04326588>.
- ref_biblio
- G. Khodabandelou, H. Moon, Y. Amirat, and S. Mohammed, "A fuzzy convolutional attention-based GRU network for human activity recognition," Engineering Applications of Artificial Intelligence, vol. 118, pp. 105702, Feb. 2023. <10.1016/j.engappai.2022.105702>. <hal-04030547>.
- ref_biblio
- H. Zilelioglu, G. Khodabandelou, A. Chibani, and Y. Amirat, "Semisupervised Generative Adversarial Networks With Temporal Convolutions for Human Activity Recognition," IEEE Sensors Journal, vol. 23, no. 11, pp. 12355-12369, Jun. 2023. <10.1109/JSEN.2023.3267243>. <hal-04326528>.
- ref_biblio
- K. Moulouel, A. Chibani, and Y. Amirat, "Ontology-based hybrid commonsense reasoning framework for handling context abnormalities in uncertain and partially observable environments," Information Sciences, vol. 631, pp. 468-486, Jun. 2023. <10.1016/j.ins.2023.02.078>. <hal-04030417>.
- ref_biblio
- M. Koosha, G. Khodabandelou, and M. M. Ebadzadeh, "A hierarchical estimation of multi-modal distribution programming for regression problems," Knowledge-Based Systems, vol. 260, pp. 110129, Jan. 2023. <10.1016/j.knosys.2022.110129>. <hal-04030563>.
- ref_biblio
- R. Mojarad, A. Chibani, F. Attal, G. Khodabandelou, and Y. Amirat, "A hybrid and context-aware framework for normal and abnormal human behavior recognition," Soft Computing, Sep. 2023. <10.1007/s00500-023-09188-4>. <hal-04326575>.
- ref_biblio
- T. Yonga Chuengwa, J. A. Swanepoel, A. M. Kurien, M. G. Kanakana-Katumba, and K. Djouani, "Research Perspectives in Collaborative Assembly: A Review," Robotics, vol. 12, no. 2, pp. 37, Mar. 2023. <10.3390/robotics12020037>. <hal-04333860>.
2022
- ref_biblio
- E. Soleimani, G. Khodabandelou, A. Chibani, and Y. Amirat, "Generic semi-supervised adversarial subject translation for sensor-based activity recognition," Neurocomputing, vol. 500, pp. 649-661, Aug. 2022. <10.1016/j.neucom.2022.05.075>. <hal-04030634>.
- ref_biblio
- H. Moon, R. Maiti, K. D. Sharma, Y. Amirat, P. Siarry, and S. Mohammed, "Hybrid Half-Gaussian Selectively Adaptive Fuzzy Control of an Actuated Ankle--Foot Orthosis," IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9635-9642, Oct. 2022. <10.1109/LRA.2022.3191187>. <hal-04030613>.
- ref_biblio
- I. Jammeli, A. Chemori, H. Moon, S. Elloumi, and S. Mohammed, "An Assistive Explicit Model Predictive Control Framework for a Knee Rehabilitation Exoskeleton," IEEE/ASME Transactions on Mechatronics, vol. 27, no. 5, pp. 3636-3647, Oct. 2022. <10.1109/TMECH.2021.3126674>. <lirmm-03495187>.
- ref_biblio
- J. Huang, S. Yan, D. Yang, D. Wu, L. Wang, Z. Yang, and S. Mohammed, "Proxy-Based Control of Intelligent Assistive Walker for Intentional Sit-to-Stand Transfer," IEEE/ASME Transactions on Mechatronics, vol. 27, no. 2, pp. 904-915, Apr. 2022. <10.1109/TMECH.2021.3074800>. <hal-04030690>.
- ref_biblio
- M. Oloyede, A. Onumanyi, H. Bello-Salau, K. Djouani, and A. Kurien, "Exploratory Analysis of Different Metaheuristic Optimization Methods for Medical Image Enhancement," IEEE Access, vol. 10, pp. 28014-28036, 2022. <10.1109/ACCESS.2022.3158324>. <hal-04333861>.
- ref_biblio
- M. Zhang, J. Huang, Y. Cao, C.-H. Xiong, and S. Mohammed, "Echo State Network-Enhanced Super-Twisting Control of Passive Gait Training Exoskeleton Driven by Pneumatic Muscles," IEEE/ASME Transactions on Mechatronics, vol. 27, no. 6, pp. 5107-5118, Dec. 2022. <10.1109/TMECH.2022.3172715>. <hal-04030579>.
- ref_biblio
- N. Ayari, H. Abdelkawy, A. Chibani, and Y. Amirat, "Hybrid Model-Based Emotion Contextual Recognition for Cognitive Assistance Services," IEEE Transactions on Cybernetics, vol. 52, no. 5, pp. 3567-3576, May. 2022. <10.1109/TCYB.2020.3013112>. <hal-04029890>.
- ref_biblio
- R. Mallat, V. Bonnet, M. A. Khalil, and S. Mohammed, "Upper Limbs Kinematics Estimation Using Affordable Visual-Inertial Sensors," IEEE Transactions on Automation Science and Engineering, vol. 19, no. 1, pp. 207-217, Jan. 2022. <10.1109/TASE.2020.3024033>. <hal-04030704>.
- ref_biblio
- W. Huo, H. Moon, M. A. Alouane, V. Bonnet, J. Huang, Y. Amirat, R. Vaidyanathan, and S. Mohammed, "Impedance Modulation Control of a Lower-Limb Exoskeleton to Assist Sit-to-Stand Movements," IEEE Transactions on Robotics, vol. 38, no. 2, pp. 1230-1249, Apr. 2022. <10.1109/TRO.2021.3104244>. <hal-04030650>.
2021
- ref_biblio
- C. Caulcrick, W. Huo, E. Franco, S. Mohammed, W. Hoult, and R. Vaidyanathan, "Model Predictive Control for Human-Centred Lower Limb Robotic Assistance," IEEE Transactions on Medical Robotics and Bionics, vol. 3, no. 4, pp. 980-991, Nov. 2021. <10.1109/TMRB.2021.3105141>. <hal-04032902>.
- ref_biblio
- D. Engelbrecht, N. Steyn, and K. Djouani, "Adaptive Virtual Impedance Control of a Mobile Multi-Robot System," Robotics, vol. 10, no. 1, pp. 19, Jan. 2021. <10.3390/robotics10010019>. <hal-04333864>.
- ref_biblio
- G. Khodabandelou, P.-G. Jung, Y. Amirat, and S. Mohammed, "Attention-Based Gated Recurrent Unit for Gesture Recognition," IEEE Transactions on Automation Science and Engineering, vol. 18, no. 2, pp. 495-507, Apr. 2021. <10.1109/TASE.2020.3030852>. <hal-04032944>.
- ref_biblio
- G. Khodabandelou, W. Kheriji, and F. H. Selem, "Link traffic speed forecasting using convolutional attention-based gated recurrent unit," Applied Intelligence, vol. 51, no. 4, pp. 2331-2352, Apr. 2021. <10.1007/s10489-020-02020-8>. <hal-04032974>.
- ref_biblio
- G. Khodabandelou, and A. Nakib, "H -polytope decomposition-based algorithm for continuous optimization," Information Sciences, vol. 558, pp. 50-75, May. 2021. <10.1016/j.ins.2020.12.090>. <hal-04030741>.
- ref_biblio
- H. Abdelkawy, N. Ayari, A. Chibani, Y. Amirat, and F. Attal, "Spatio-Temporal Convolutional Networks and N-Ary Ontologies for Human Activity-Aware Robotic System," IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 620-627, Apr. 2021. <10.1109/LRA.2020.3047780>. <hal-04032920>.
- ref_biblio
- H. Kordestani, R. Mojarad, A. Chibani, K. Barkaoui, Y. Amirat, and W. Zahran, "Extended Hapicare: A telecare system with probabilistic diagnosis and self-adaptive treatment," Expert Systems with Applications, vol. 186, pp. 115749, Dec. 2021. <10.1016/j.eswa.2021.115749>. <hal-04034457>.
- ref_biblio
- L. Schoneveld, A. Othmani, and H. Abdelkawy, "Leveraging recent advances in deep learning for audio-Visual emotion recognition," Pattern Recognition Letters, vol. 146, pp. 1-7, Jun. 2021. <10.1016/j.patrec.2021.03.007>. <hal-04032955>.
- ref_biblio
- P. Alizadeh, A. Osmani, M. E. Khanouche, A. Chibani, and Y. Y. Amirat, "Reinforcement Learning for Interactive QoS-Aware Services Composition," IEEE Systems Journal, 2021. <10.1109/JSYST.2020.2997069>. <hal-02924667>.
- ref_biblio
- T. Du Plessis, K. Djouani, and C. Oosthuizen, "A Review of Active Hand Exoskeletons for Rehabilitation and Assistance," Robotics, vol. 10, no. 1, pp. 40, Mar. 2021. <10.3390/robotics10010040>. <hal-04333865>.
2020
- ref_biblio
- A. Othmani, A. R. Taleb, H. Abdelkawy, and A. Hadid, "Age estimation from faces using deep learning: A comparative analysis," Computer Vision and Image Understanding, vol. 196, pp. 102961, Jul. 2020. <10.1016/j.cviu.2020.102961>. <hal-04034369>.
- ref_biblio
- P. Z. Sotenga, K. Djouani, A. M. Kurien, and M. Mwila, "Implementation of an indoor localisation algorithm for Internet of Things," Future Generation Computer Systems, vol. 107, pp. 1037-1046, Jun. 2020. <10.1016/j.future.2018.01.056>. <hal-04333872>.
- ref_biblio
- R. Mojarad, F. Attal, A. Chibani, and Y. Amirat, "Automatic Classification Error Detection and Correction for Robust Human Activity Recognition," IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2208-2215, Apr. 2020. <10.1109/LRA.2020.2970667>. <hal-04033003>.
- ref_biblio
- W. Huo, M. A. Alouane, Y. Amirat, and S. Mohammed, "Force Control of SEA-Based Exoskeletons for Multimode Human--Robot Interactions," IEEE Transactions on Robotics, vol. 36, no. 2, pp. 570-577, Apr. 2020. <10.1109/TRO.2019.2956341>. <hal-04032995>.
2019
- ref_biblio
- A. Achroufene, Y. Y. Amirat, and A. Chibani, "RSS-based Indoor Localization Using Belief Function Theory," IEEE Transactions on Automation Science and Engineering, vol. 16, no. 3, pp. 1163-1180, 2019. <10.1109/TASE.2018.2873800>. <hal-01878843>.
- ref_biblio
- A. Meziani, K. Djouani, T. Medkour, and A. Chibani, "A Lasso quantile periodogram based feature extraction for EEG-based motor imagery," Journal of Neuroscience Methods, vol. 328, pp. 108434, Dec. 2019. <10.1016/j.jneumeth.2019.108434>. <hal-04034893>.
- ref_biblio
- K. Oyebode, S. Du, B. J. Van Wyk, and K. Djouani, "A Sample-Free Bayesian-Like Model for Indoor Environment Recognition," IEEE Access, vol. 7, pp. 79783-79790, 2019. <10.1109/ACCESS.2019.2920686>. <hal-04333877>.
- ref_biblio
- M. A. Alouane, H. Rifai, K. Kim, Y. Amirat, and S. Mohammed, "Hybrid impedance control of a knee joint orthosis," Industrial Robot: An International Journal, vol. 46, no. 2, pp. 192-201, Mar. 2019. <10.1108/IR-08-2018-0165>. <hal-04034832>.
- ref_biblio
- M. E. Khanouche, F. Attal, Y. Amirat, A. Chibani, and M. Kerkar, "Clustering-based and QoS-aware services composition algorithm for ambient intelligence," Information Sciences, vol. 482, pp. 419-439, May. 2019. <10.1016/j.ins.2019.01.015>. <hal-04034757>.
- ref_biblio
- M. S. Khanouche, F. Attal, Y. Y. Amirat, A. Chibani, and M. Kerkar, "Clustering-based and QoS-aware services Composition Algorithm for ambient intelligence," Information Sciences, vol. 482, pp. 419-439, 2019. <hal-01970051>.
- ref_biblio
- V. Arnez-Paniagua, H. H. Rifai, Y. Y. Amirat, M. Ghedira, J. M. Gracies, and S. S. Mohammed, "Adaptive control of an actuated ankle foot orthosis for paretic patients," Control Engineering Practice, vol. 90, pp. 207-220, Sep. 2019. <hal-02185618>.
- ref_biblio
- W. Huo, V. Arnez-Paniagua, G. Ding, Y. Amirat, and S. Mohammed, "Adaptive Proxy-Based Controller of an Active Ankle Foot Orthosis to Assist Lower Limb Movements of Paretic Patients," Robotica, vol. 37, no. 12, pp. 2147-2164, Dec. 2019. <10.1017/S0263574719000250>. <hal-04034846>.
- ref_biblio
- Y. Cao, J. Huang, Z. Huang, X. Tu, and S. Mohammed, "Optimizing Control of Passive Gait Training Exoskeleton Driven by Pneumatic Muscles Using Switch-Mode Firefly Algorithm," Robotica, vol. 37, no. 12, pp. 2087-2103, Dec. 2019. <10.1017/S0263574719000511>. <hal-04034857>.
2018
- ref_biblio
- A. Riani, T. Madani, A. Benallegue, and K. Djouani, "Adaptive integral terminal sliding mode control for upper-limb rehabilitation exoskeleton," Control Engineering Practice, vol. 75, pp. 108-117, Jun. 2018. <10.1016/j.conengprac.2018.02.013>. <hal-04035042>.
- ref_biblio
- F. Attal, A. Boubezoul, A. Same, L. Oukhellou, and S. Espie, "Powered Two-Wheelers Critical Events Detection and Recognition Using Data-Driven Approaches," IEEE Transactions on Intelligent Transportation Systems, vol. 19, no. 12, pp. 4011-4022, Jan. 2018. <10.1109/TITS.2018.2797065>. <hal-01889113>.
- ref_biblio
- F. Attal, Y. Y. Amirat, A. Chibani, and S. S. Mohammed, "Automatic Recognition of Gait phases Using a Multiple Regression Hidden Markov Model," IEEE/ASME Transactions on Mechatronics, vol. 23, no. 4, pp. 1597-1607, 2018. <hal-01792494>.
- ref_biblio
- J. Guerrero-Castellanos, H. Rifai, V. Arnez-Paniagua, J. Linares-Flores, L. Saynes-Torres, and S. S. Mohammed, "Robust Active Disturbance Rejection Control via Control Lyapunov Functions: Application to Actuated-Ankle--Foot-Orthosis," Control Engineering Practice, vol. 80, pp. 49-60, 2018. <hal-01878840>.
- ref_biblio
- K. Safi, S. S. Mohammed, F. Attal, Y. Y. Amirat, L. Oukhellou, M. Khalil, J.-M. Gracies, and E. Hutin, "Automatic Segmentation of Stabilometric Signals using Hidden Markov Model Regression," IEEE Transactions on Automation Science and Engineering, vol. 15, no. 2, pp. 545-555, 2018. <hal-01538497>.
- ref_biblio
- L. Sabri, S. Bouznad, S. Fiorini, A. Chibani, E. Prestes, and Y. Amirat, "An integrated semantic framework for designing context-aware Internet of Robotic Things systems," Integrated Computer-Aided Engineering, vol. 25, no. 2, pp. 137-156, 2018. <hal-01699863>.
- ref_biblio
- M. A. Gomez, A. Chibani, Y. Y. Amirat, and E. Matson, "IoRT cloud survivability framework for robotic AALs using HARMS," Robotics and Autonomous Systems, vol. 106, pp. 192-206, 2018. <hal-01794059>.
- ref_biblio
- N. Temglit, A. A. Chibani, K. Djouani, and M. A. Nacer, "A Distributed Agent-Based Approach for Optimal QoS Selection in Web of Object Choreography," IEEE Systems Journal, vol. 12, no. 2, pp. 1655 -1666, 2018. <hal-01681964>.
- ref_biblio
- R. Bkekri, A. Benamor, M.-A. Alouane, G. G. Fried, and H. Messaoud, "Robust adaptive sliding mode control for a human-driven knee joint orthosis," Industrial Robot: An International Journal, vol. 45, no. 3, pp. 379-389, 2018. <hal-01865347>.
- ref_biblio
- S. Hagane, L. K. R. Ardila, T. Katsumata, V. V. Bonnet, P. Fraisse, and G. Venture, "Adaptive Generalized Predictive Controller and Cartesian Force Control for Robot Arm Using Dynamics and Geometric Identification," Journal of Robotics and Mechatronics, vol. 30, no. 6, pp. 927-942, Dec. 2018. <10.20965/jrm.2018.p0927>. <hal-02048098>.
- ref_biblio
- S. S. Mohammed, J. Moreno, T. Sugar, Y. Hasegawa, N. Vitiello, Q. Wang, and C. Walsh, "Wearable Robotics for Motion Assistance and Rehabilitation [TC Spotlight]," IEEE Robotics and Automation Magazine, vol. 25, no. 1, pp. 19-28, 2018. <hal-01746062>.
- ref_biblio
- V. Joukov, V. V. Bonnet, M. Karg, G. Venture, and . Kuli\'c, "Rhythmic Extended Kalman Filter for Gait Rehabilitation Motion Estimation and Segmentation," IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 26, no. 2, pp. 407-418, Feb. 2018. <hal-02048092>.
- ref_biblio
- V. V. Bonnet, K. Pfeiffer, P. Fraisse, A. Crosnier, and G. Venture, "Self-Generation of Optimal Exciting Motions for Identification of a Humanoid Robot," International Journal of Humanoid Robotics, vol. 15, no. 6, pp. 1850024, Dec. 2018. <10.1142/S021984361850024X>. <hal-02048085>.
- ref_biblio
- W. Huo, M. Ghédira, S. Mohammed, V. Arnez-Paniagua, E. Hutin, and J. Gracies, "Effect of knee joint angle-based, adaptive functional electrical stimulation of the peroneal nerve in spastic paresis. A case report," Annals of Physical and Rehabilitation Medicine, vol. 61, pp. e475-e476, Jul. 2018. <10.1016/j.rehab.2018.05.1110>. <hal-04035053>.
- ref_biblio
- W. Huo, S. Mohammed, Y. Amirat, and K. Kong, "Fast Gait Mode Detection and Assistive Torque Control of an Exoskeletal Robotic Orthosis for Walking Assistance (E-ROWA)," IEEE Transactions on Robotics, vol. 34, no. 4, pp. 1035-1052, 2018. <10.1109/TRO.2018.2830367>. <hal-01792559>.
- ref_biblio
- W. Huo, S. Mohammed, and Y. Amirat, "Impedance Reduction Control of a Knee Joint Human Exoskeleton System," IEEE Transactions on Control Systems Technology, vol. 27, no. 6, pp. 2541-2556, 2018. <10.1109/TCST.2018.2865768>. <hal-01865344>.
2017
- ref_biblio
- H. Rifai, S. S. Mohammed, K. Djouani, and Y. Y. Amirat, "Towards Lower Limbs Functional Rehabilitation through a Knee Joint Exoskeleton," IEEE Transactions on Control Systems Technology, vol. 25, no. 2, pp. 712-719, 2017. <hal-01538487>.
- ref_biblio
- K. Safi, S. S. Mohammed, I.-M. Albertsen, E. Delechelle, Y. Y. Amirat, M. Khalil, J.-M. Gracies, and E. Hutin, "Analysis of Human Balance Control using Empirical Mode Decomposition," Signal, Image and Video Processing, vol. 11, no. 6, pp. 1081-1088, 2017. <hal-01538495>.
- ref_biblio
- S. Futamure, V. V. Bonnet, R. Dumas, and G. Venture, "A sensitivity analysis method for the body segment inertial parameters based on ground reaction and joint moment regressor matrices," Journal of Biomechanics, vol. 64, pp. 85-92, Nov. 2017. <10.1016/j.jbiomech.2017.09.005>. <hal-01616928>.
- ref_biblio
- S. S. Mohammed, H.-W. Park, C.-H. Park, Y. Y. Amirat, and B. Argall, "Special Issue on assistive and rehabilitation robotics," Autonomous Robots, vol. 41, no. 3, pp. 513-517, 2017. <hal-01538488>.
- ref_biblio
- T. Robert, P. Leborgne, M. Abid, V. V. Bonnet, G. Venture, and R. Dumas, "Whole body segment inertia parameters estimation from movement and ground reaction forces: a feasibility study," Computer Methods in Biomechanics and Biomedical Engineering, vol. 20, no. sup1, pp. 175-176, Oct. 2017. <hal-02048103>.
- ref_biblio
- T. T. Madani, B. B. Daachi, and K. Djouani, "Modular-Controller-Design-Based Fast Terminal Sliding Mode for Articulated Exoskeleton Systems," IEEE Transactions on Control Systems Technology, vol. 25, no. 3, pp. 1133-1140, 2017. <hal-01538486>.
- ref_biblio
- V. V. Bonnet, R. Dumas, A. Cappozzo, V. Joukov, G. Daune, and . Kuli\'c, "A constrained extended Kalman filter for the optimal estimate of kinematics and kinetics of a sagittal symmetric exercise," Journal of Biomechanics, vol. 62, pp. 140-147, 2017. <10.1016/j.jbiomech.2016.12.027>. <hal-01628003>.
- ref_biblio
- V. V. Bonnet, V. Richard, V. Camomilla, G. Venture, A. Cappozzo, and R. Dumas, "Joint kinematics estimation using a multi-body kinematics optimisation and an extended Kalman filter, and embedding a soft tissue artefact model," Journal of Biomechanics, 2017. <10.1016/j.jbiomech.2017.04.033>. <hal-01616915>.
2016
- ref_biblio
- A. Yachir, Y. Y. Amirat, A. A. Chibani, and N. Badache, "Service-Oriented, User-Centered and Event-Aware Framework for Ambient Intelligence and Internet of Things," IEEE Transactions on Automation Science and Engineering, vol. 13, no. 1, pp. 85-102, 2016. <hal-01538494>.
- ref_biblio
- B. Achili, T. T. Madani, B. B. Daachi, and K. Djouani, "Adaptive Observer Based on MLPNN and Sliding Mode for Wearable Robots: Application to an Active Joint Orthosis," Neurocomputing, vol. 197, pp. 69-77, 2016. <hal-01538491>.
- ref_biblio
- M. O. Ajayi, K. Djouani, and Y. Hamam, "Rhythmic Trajectory Design and Control for Rehabilitative Walking in Patients with Lower Limb Disorder," International Journal of Humanoid Robotics, vol. 13, no. 4, pp. 1-35, 2016. <hal-01681975>.
- ref_biblio
- M. S. Khanouche, Y. Y. Amirat, A. A. Chibani, M. Kerkar, and A. Yachir, "Energy-centered and QoS-aware services selection for Internet of Things," IEEE Transactions on Automation Science and Engineering, vol. 13, no. 3, pp. 1256-1269, 2016. <hal-01538496>.
- ref_biblio
- N. Ayari, A. A. Chibani, Y. Y. Amirat, and E. Matson, "A Semantic Approach for Enhancing Assistive Services in ubiquitous robotics," Robotics and Autonomous Systems, vol. 75, pp. 17-27, 2016. <hal-01538498>.
- ref_biblio
- S. Oh, S. S. Mohammed, and K. Kong, "Design and control of an active ankle-knee orthosis inspired by biarticular musculoskeletal structure of the human lower limb," Robotics and Autonomous Systems, vol. 75, pp. 107-117, 2016. <hal-01538493>.
- ref_biblio
- S. S. Mohammed, W. Huo, J. Huang, H. Rifai, and Y. Y. Amirat, "Nonlinear Disturbance Observer Based Sliding Mode Control of a Human-Driven Knee Joint Orthosis," Robotics and Autonomous Systems, vol. 75, pp. 41-49, 2016. <hal-01538490>.
- ref_biblio
- T. Patkos, D. Plexousakis, A. A. Chibani, and Y. Y. Amirat, "An Event Calculus production rule system in dynamic and uncertain domains," Theory and Practice of Logic Programming, vol. 16, no. 3, pp. 325-352, 2016. <hal-01538499>.
- ref_biblio
- T. T. Madani, B. B. Daachi, and K. Djouani, "Non-singular terminal sliding mode controller: Application to an actuated exoskeleton," Mechatronics, vol. 33, pp. 136-145, 2016. <hal-01538492>.
- ref_biblio
- W. Huo, S. S. Mohammed, J. C. Moreno, and Y. Y. Amirat, "Lower Limb Wearable Robots for Assistance and Rehabilitation: A state of the Art," IEEE Systems Journal, vol. 10, no. 3, pp. 1068-1081, 2016. <hal-01538489>.
- ref_biblio
- Y. Amirat, D. Daney, S. Mohammed, A. Spalanzani, A. Chibani, and O. Simonin, "Assistance and Service Robotics in a Human Environment," Robotics and Autonomous Systems, vol. 75, no. Part A, pp. 1-3, Jan. 2016. <10.1016/j.robot.2015.11.002>. <hal-01262584>.
2015
- ref_biblio
- F. Attal, S. S. Mohammed, M. Dedabrishvili, F. Chamroukhi, L. Oukhellou, and Y. Y. Amirat, "Physical Human Activity Recognition Using Wearable Sensors," Sensors, vol. 15, no. 12, pp. 31314-31338, Jan. 2015. <hal-01352101>.
- ref_biblio
- J. Huang, W. Huo, W.-J. Xu, S. S. Mohammed, and Y. Y. Amirat, "Control of Upper-Limb Power-Assist Exoskeleton Using A Human-Robot Interface Based on Motion Intention Recognition," IEEE Transactions on Automation Science and Engineering, vol. 12, no. 4, pp. 1257-1272, 2015. <hal-01538507>.
- ref_biblio
- J. Huang, W.-J. Xu, S. S. Mohammed, and Z. Shu, "Posture estimation and human support using wearable sensors and walking-aid robot," Robotics and Autonomous Systems, vol. 73, no. 11, pp. 24-43, 2015. <hal-01538503>.
- ref_biblio
- K. H. Low, T. Hu, S. S. Mohammed, J. Tangorra, and M. Kovac, "Perspectives on biologically inspired hybrid and multi-modal locomotion," Bioinspiration and Biomimetics, vol. 10, no. 2, 2015. <hal-01538504>.
- ref_biblio
- K.-H. Low, S. S. Mohammed, T. Hu, J. E. Seipel, R. Vaidyanathan, and J. Solís, "Biorobotics with Hybrid and Multimodal Locomotion," IEEE Robotics and Automation Magazine, vol. 22, no. 3, pp. 29-32, 2015. <hal-01538505>.
- ref_biblio
- L. Bennacer, Y. Y. Amirat, A. A. Chibani, A. Mellouk, and L. Ciavaglia, "Self-Diagnosis technique for Virtual Private Networks combining Bayesian Networks and Case-Based Reasoning," IEEE Transactions on Automation Science and Engineering, vol. 12, no. 1, pp. 354-366, 2015. <hal-01538572>.
- ref_biblio
- M. E. Daachi, T. T. Madani, B. B. Daachi, and K. Djouani, "A radial basis function neural network adaptive controller to drive a powered lower limb knee joint orthosis," Applied Soft Computing, vol. 34, pp. 324-336, 2015. <hal-01538506>.
- ref_biblio
- N. Steyn, Y. Hamam, E. Monacelli, and K. Djouani, "Modelling and Design of an Augmented Reality Differential Drive Mobility Aid in an Enabled Environment," Simulation Modelling Practice and Theory, vol. 51, pp. 115-134, 2015. <hal-01681978>.
- ref_biblio
- R. Menasri, A. Nakib, B. B. Daachi, H. Oulhadj, and P. .. Siarry, "A trajectory planning of redundant manipulators based on bilevel optimization," Applied Mathematics and Computation, vol. 250, pp. 934-947, 2015. <hal-01538502>.
- ref_biblio
- S. Oh, E. Baek, S. Song, S. S. Mohammed, D. Jeon, and K. Kong, "A generalized control framework of assistive controllers and its application to lower limb exoskeletons," Robotics and Autonomous Systems, vol. 73, pp. 68-77, 2015. <hal-01538501>.
2014
- ref_biblio
- A. Nakib, B. B. Daachi, M. Dakkak, and P. .. Siarry, "Mobile Tracking Based On Fractional Integration," IEEE Transactions on Mobile Computing, vol. 13, no. 10, pp. 2306--2319, 2014. <10.1109/TMC.2013.37>. <hal-01538576>.
- ref_biblio
- W. Hassani, S. S. Mohammed, H. Rifai, and Y. Y. Amirat, "Powered orthosis for lower limb movements assistance and rehabilitation," Control Engineering Practice, vol. 26, no. 5, pp. 245-253, 2014. <hal-01538508>.
2013
- ref_biblio
- A. A. Chibani, Y. Y. Amirat, S. S. Mohammed, E. Matson, N. Hagita, and M. Baretto, "Ubiquitous Robotics: Recent Challenges and Future Trends," Robotics and Autonomous Systems, vol. 61, no. 11, pp. 1162-1172, 2013. <hal-01538583>.
- ref_biblio
- A. Chibani, Y. Amirat, S. Mohammed, E. Matson, N. Hagita, and M. Baretto, "Ubiquitous Robotics: Recent Challenges and Future Trends," Robotics and Autonomous Systems, vol. 61, no. 11, pp. 1162-1172, 2013. <hal-00917212>.
- ref_biblio
- A. Nakib, D. B., M. Dakkak, and P. .. Siarry, "Mobile Tracking Base On Fractional Integration," IEEE Transactions on Mobile Computing, pp. DOI: 10.1109/TMC.2013.37, 2013. <10.1109/TMC.2013.37>. <hal-00917117>.
- ref_biblio
- D. A. Rambim, M. Mzyece, and K. Djouani, "Cross-Layer Enhancement to Support TCP-Based Traffics in WLANs," Wireless Personal Communications, vol. 70, no. 4, pp. 1827-1840, 2013. <hal-00918563>.
- ref_biblio
- D. Trabelsi, S. Mohammed, F. Chamroukhi, L. Oukhellou, and Y. Amirat, "An Unsupervised Approach for Automatic Activity Recognition Based on Hidden Markov Model Regression," IEEE Transactions on Automation Science and Engineering, vol. 3, no. 10, pp. 829-335, Jul. 2013. <10.1109/TASE.2013.2256349>. <hal-00865069>.
- ref_biblio
- E. Prestes, J. L. Carbonera, S. Fiorini, V. A. M. Jorge, M. Abel, R. Madhavan, A. Locoro, P. Goncalves, M. E. Barreto, M. Habib, A. Chibani, S. Gérard, Y. Amirat, and C. Schlenoff, "Towards a Core Ontology for Robotics and Automation," Robotics and Autonomous Systems, vol. 61, no. 11, pp. 1193-1204, 2013. <10.1016/j.robot.2013.04.005>. <hal-00917096>.
- ref_biblio
- F. Chamroukhi, S. Mohammed, L. Oukhellou, Y. Amirat, and D. Trabelsi, "Joint segmentation of multivariate time series with hidden process regression for human activity recognition," Neurocomputing, vol. 633, no. 120, pp. 633-644, Jan. 2013. <10.1016/j.neucom.2013.04.003>. <hal-00864854>.
- ref_biblio
- F. Sebbak, A. A. Chibani, Y. Y. Amirat, A. Mokhtari, and F. Benhammadi, "An Evidential Fusion Approach for Activity Recognition in Ambient Intelligence Environments," Robotics and Autonomous Systems, vol. 61, no. 11, pp. 1235-1245, 2013. <hal-01538579>.
- ref_biblio
- F. Sebbak, A. Chibani, Y. Amirat, A. Mokhtari, and F. Benhammadi, "An Evidential Fusion Approach for Activity Recognition in Ambient Intelligence Environments," Robotics and Autonomous Systems, vol. 61, no. 11, pp. 1235-1245, 2013. <hal-00917112>.
- ref_biblio
- H. Rifai, S. Mohammed, W. Hassani, and Y. Amirat, "Nested Saturation Based Control of an Actuated Knee Joint Orthosis," Mechatronics, vol. 23, no. 8, pp. 1141-1149, 2013. <10.1016/j.mechatronics.2013.09.007>. <hal-00915322>.
- ref_biblio
- H. Rifai, S. S. Mohammed, W. Hassani, and Y. Y. Amirat, "Nested Saturation Based Control of an Actuated Knee Joint Orthosis," Mechatronics, vol. 23, no. 8, pp. 1141-1149, 2013. <10.1016/j.mechatronics.2013.09.007>. <hal-01538582>.
- ref_biblio
- M. Lalami, H. Rifai, S. Mohammed, W. Hassani, G. Fried, and Y. Amirat, "Output feedback Control of an Actuated Lower Limb Orthosis with Bounded Input," Industrial Robot: An International Journal, vol. 40, no. 6, pp. 541 - 549, 2013. <hal-00916897>.
- ref_biblio
- M. Lalami, H. Rifai, S. S. Mohammed, W. Hassani, G. G. Fried, and Y. Y. Amirat, "Output feedback Control of an Actuated Lower Limb Orthosis with Bounded Input," Industrial Robot: An International Journal, vol. 40, no. 6, pp. 541-549, 2013. <hal-01538584>.
- ref_biblio
- S. Mefoued, S. Mohammed, and Y. Amirat, "Towards Movement Restoration of Knee Joint Using Robust Control of Powered Orthosis," IEEE Transactions on Control Systems Technology, vol. 21, no. 6, pp. 2156-2168, 2013. <hal-00917204>.
- ref_biblio
- S. Mefoued, S. S. Mohammed, and Y. Y. Amirat, "Towards Movement Restoration of Knee Joint Using Robust Control of Powered Orthosis," IEEE Transactions on Control Systems Technology, vol. 21, no. 6, pp. 2156-2168, 2013. <hal-01538578>.
- ref_biblio
- T. T. Madani, B. B. Daachi, and A. Benallègue, "Adaptive Variable Structure Controller of Redundant Robots with Mobile/Fixed Obstacle Avoidance," Robotics and Autonomous Systems, vol. 61, no. 6, pp. 555-564, 2013. <hal-00917118>.
2012
- ref_biblio
- A. M. Kurien, G. Noel, K. Djouani, B. J. V. Wyk, and A. Mellouk, "A Subscriber Classification Approach for Mobile Cellular Networks," Simulation Modelling Practice and Theory, vol. 25, pp. 17-35, 2012. <hal-01678435>.
- ref_biblio
- A. M. Kurien, N. Mccullagh, K. Djouani, B. Van Wyk, and A. Mellouk, "A Subscriber Classification Approach for Mobile Cellular Networks," Simulation Modelling Practice and Theory, pp. 17-35, 2012. <hal-01107699>.
- ref_biblio
- A. Yachir, Y. Y. Amirat, A. A. Chibani, and N. Badache, "Towards an Event-Aware Approach for Ubiquitous Computing based on Automatic Service Composition and Selection," Annals of Telecommunications - annales des télécommunications, vol. 67, no. 7-8, pp. 341-353, 2012. <hal-01679841>.
- ref_biblio
- B. Achili, B. B. Daachi, Y. Y. Amirat, A. Ali-Chérif, and M. E. Daachi, "A Stable Adaptive Force/Position Controller for a C5 Parallel Robot: A Neural Network Approach," Robotica, Cambridge University Press, vol. 30, no. 7, pp. 1177-1187, 2012. <hal-01679850>.
- ref_biblio
- B. B. Daachi, T. T. Madani, and A. Benallegue, "Adaptive Neural Controller for Redundant Robot Manipulators and Collision Avoidance with Mobile Obstacles," Neurocomputing, vol. 79, pp. 50-60, 2012. <hal-01679840>.
- ref_biblio
- G. Noel, K. Djouani, B. Van Wyk, and Y. Hamam, "Bilateral Mesh Filtering," Pattern Recognition Letters, vol. 33, no. 12, pp. 1101-1107, 2012. <hal-00918111>.
- ref_biblio
- L. Miao, K. Djouani, A. Kurien, and G. Noel, "Network Coding and Competitive Approach for Gradient Based Routing in Wireless Sensor Networks," Ad Hoc Networks, vol. 10, no. 6, pp. 990-1008, 2012. <hal-00918107>.
- ref_biblio
- M. Daachi, B. Achili, B. Daachi, Y. Amirat, and D. Chikouche, "Hybrid moment/position control of a parallel robot," International Journal of Control, Automation and Systems, vol. 10, no. 3, pp. 536-546, 2012. <hal-00917507>.
- ref_biblio
- M. E. Daachi, B. Achili, B. B. Daachi, Y. Y. Amirat, and D. Chikouche, "Hybrid moment/position control of a parallel robot," International Journal of Control, Automation and Systems, vol. 10, no. 3, pp. 536-546, 2012. <hal-01679847>.
- ref_biblio
- M. E. H. Daachi, B. Achili, B. Daachi, Y. Amirat, and D. Chikouche, "Hybrid moment/position control of a parallel robot, Hybrid moment/position control of a parallel robot," International Journal of Control, Automation and Systems, vol. 10, no. 3, pp. 536-546, Jun. 2012. <hal-01058945>.
- ref_biblio
- N. Boumella, K. Djouani, and M. Boulemden, "A robust interval Type-2 TSK Fuzzy Logic System design based on Chebyshev fitting," International Journal of Control, Automation and Systems, vol. 10, no. 4, pp. 727-736, 2012. <hal-01679845>.
- ref_biblio
- O. Niang, A. Thioune, M. C. E. Gueirea, E. Delechelle, and J. Lemoine, "Partial Differential Equation-Based Approach for Empirical Mode Decomposition: Application on Image Analysis," IEEE Transactions on Image Processing, vol. 21, no. 9, pp. 3991-4001, 2012. <hal-01678444>.
- ref_biblio
- O. Niang, A. Thioune, M. C. El Gueirea, E. Deléchelle, and J. Lemoine, "Partial Differential Equation-Based Approach for Empirical Mode Decomposition: Application on Image Analysis," IEEE Transactions on Image Processing, vol. 21, no. 9, pp. 1057-7149, 2012. <hal-00711938>.
- ref_biblio
- O. Niang, A. Thioune, M. Gueirea, E. Deléchelle, and J. Lemoine, "Partial Differential Equation-Based Approach for Empirical Mode Decomposition: Application on Image Analysis," IEEE Transactions on Image Processing, pp. 1057-7149, 2012. <hal-01107697>.
- ref_biblio
- O. Niang, A. Thioune, M. Gueirea, E. Deléchelle, and J. Lemoine, "Partial Differential Equation-Based Approach for Empirical Mode Decomposition: Application on Image Analysis," IEEE Transactions on Image Processing, pp. 3991-4001, 2012. <hal-00923361>.
- ref_biblio
- S. Abbas-Khan, B. B. Daachi, and K. Djouani, "Application of Fuzzy Inference Systems to Detection of Faults in Wireless Sensor Networks," Neurocomputing, vol. 94, pp. 111-120, 2012. <hal-01679844>.
- ref_biblio
- S. Hoceini, A. Mellouk, A. A. Chibani, Y. Touati, and B. Augustin, "Swarm Intelligence Routing Approach in Networked Robots," Annals of Telecommunications - annales des télécommunications, vol. 67, no. 8, pp. 377-386, 2012. <hal-01678441>.
- ref_biblio
- S. Hoceini, A. Mellouk, A. Chibani, Y. Touati, and B. Augustin, "Swarm intelligence routing approach in networked robots," Annals of Telecommunications - annales des télécommunications, pp. 377-386, 2012. <hal-01058948>.
- ref_biblio
- S. S. Mohammed, P. Poignet, P. Fraisse, and D. Guiraud, "Toward Lower Limbs Movement Restoration With Input-Output Feedback Linearization and Model Predictive Control," Control Engineering Practice, vol. 20, no. 2, pp. 182-195, 2012. <10.1016/j.conengprac.2011.10.010>. <hal-00917505>.
- ref_biblio
- S. S. Mohammed, Y. Y. Amirat, and H. Rifai, "Lower Limb Mouvement Assistance through Wearable Robots: State of the Art and Challenges," Advanced Robotics, vol. 26, no. 1-2, pp. 1-22, 2012. <hal-01679848>.
- ref_biblio
- T. Olwal, K. Djouani, O. Kogeda, and B. Van Wyk, "Joint Queue-perturbed and Weakly-Coupled Power Control for Wireless Backbone Networks," International Journal of Applied Mathematics and Computer Science, vol. 22, no. 3, pp. 749-764, 2012. <hal-00918116>.
- ref_biblio
- Y. Y. Amirat, A. Mellouk, N. Hagita, and D. Song, "Foreword: Ubiquitous Networked Robots," Annals of Telecommunications - annales des télécommunications, vol. 67, no. 8, pp. 295-296, 2012. <hal-01679846>.
2011
- ref_biblio
- C. Tu, S. Du, B. Van Wyk, K. Djouani, and Y. Hamam, "High resolution Hough transform based on butterfly selfsimilarity," Electronics Letters, vol. 47, no. 25, pp. 1360-1361, 2011. <hal-00918251>.
- ref_biblio
- M. Dakkak, A. Nakib, B. B. Daachi, P. .. Siarry, and J. Lemoine, "Indoor localization method based on RTT and AOA using coordinates clustering," Computer Networks, vol. 55, no. 8, pp. 1794-1803, 2011. <hal-01679164>.
- ref_biblio
- Y. Bailly, Y. Y. Amirat, and G. G. Fried, "Modelling and control of a continuum style microrobot for endovascular surgery," IEEE Transactions on Robotics, vol. 27, no. 5, pp. 1024-1030, 2011. <hal-01679852>.
- ref_biblio
- Y. Sun, K. Djouani, G. Qi, B. Van Wyk, and Z. Wang, "Fully Connected Swarm Particles Optimisation," Engineering Optimization, vol. 43, no. 7, pp. DOI: 10.1080/0305215X.2010.521242, 2011. <hal-00918248>.
2010
- ref_biblio
- B. Achili, B. B. Daachi, A. A. Chérif, and Y. Y. Amirat, "A C5 Parallel Robot Identification and Control," International Journal of Control, Automation and Systems, vol. 2, no. 2, pp. 369-377, 2010. <hal-01679856>.
- ref_biblio
- B. Achili, B. B. Daachi, Y. Y. Amirat, and A. A. Chérif, "A Robust Adaptive Control of a Parallel Robot," International Journal of Control, vol. 83, no. 10, pp. 2107--2119, 2010. <hal-01679855>.
- ref_biblio
- O. Niang, E. Deléchelle, and J. Lemoine, "A Spectral Approach for Sifting Process in Empirical Mode Decomposition," IEEE Transactions on Signal Processing, vol. 58, no. 11, pp. 5612-5623, 2010. <10.1109/TSP.2010.2055563>. <hal-01679854>.
- ref_biblio
- O. O. Niang, E. Deléchelle, and J. Lemoine, "A spectral approach for sifting process in Empirical Mode Decomposition," IEEE Transactions on Signal Processing, vol. 58, no. 11, pp. 5612 - 5623, 2010. <10.1109/TSP.2010.2055563>. <hal-00662003>.
- ref_biblio
- T.-O. Olwal, B. J. V. Wyk, K. Djouani, Y. Hamam, and P. .. Siarry, "Singularly-perturbed weakly-coupled based power control for multi-radio multi-channel wireless networks," International Journal of Applied Mathematics and Computer Science, vol. 6, no. 1, pp. 4-14, 2010. <hal-01679174>.
2009
- ref_biblio
- J.-C. J. C. Nunes, and E. Deléchelle, "Empirical Mode Decomposition: Applications on signal and image processing," Advances in Adaptive Data Analysis, vol. 1, no. 1, pp. 125-175, 2009. <10.1142/S1793536909000059>. <hal-00665784>.
2008
- ref_biblio
- Y. Touati, Y. Y. Amirat, N. Saadia, and A. Ali-Chérif, "A Neural network based approach for an assembly cell control," Journal of Applied Soft Computing, Springer, vol. 8, no. 4, pp. 1335-1343, 2008. <hal-01679857>.
Ouvrage : 3
2015
- ref_biblio
- S. Mohammed, J. Moreno, K. Kong, and Y. Amirat, Intelligent Assistive Robots- Recent advances in assistive robotics for everyday activities, Springer Tracts in Advanced Robotics, vol. 106, Springer International Publishing, 2015. <10.1007/978-3-319-12922-8>. <hal-01540974>.
2013
- ref_biblio
- A. Khalaf, Y. Hamam, and K. Djouani, Mathematical Maintenance Model for Medical Equipment, Scholar's Press, 2013. <hal-01569706>.
2012
- ref_biblio
- Y. Amirat, A. Mellouk, N. Hagita, and D. Song, Ubiquitous Networks Robots, vol. 67 (7-8), Special Issue of Springer Annals of Telecommunications, 2012. <hal-01678751>.
Communication dans un congrès : 211
2025
- ref_biblio
- A. C. Abbes, M. E. Khanouche, F. Attal, A. Tari, and A. Chibani, "Internet of Behaviors-Based Focus State Classification for Enhancing Educational Engagement," in 2025 IEEE 37th International Conference on Tools with Artificial Intelligence (ICTAI), Athens, Greece, Nov. 2025, pp. 1117-1123. <10.1109/ICTAI66417.2025.00163>. <hal-05545246>.
- ref_biblio
- F. Becanovic, V. Bonnet, K. Jovanovic, S. S. Mohammed, and R. Dumas, "Inverse optimal control reveals square of muscle power minimisation in post-stroke gait," in ISB 2025 - Congress of International Society of Biomechanics, Stockhlom, Sweden, Jul. 2025. <hal-05446232>.
2023
- ref_biblio
- A. Jellali, T. Madani, N. Khraief, and S. Belghith, "Non-Singular Terminal Sliding Mode Controller in Cartesian Space: Application to an Upper Limb Exoskeleton," in IEEE 21st International Conference on Advanced Robotics (ICAR 2023), Abu Dabi, France, Dec. 2023, pp. 558-563. <hal-04329135>.
- ref_biblio
- F. Becanovic, V. Bonnet, R. Dumas, K. Jovanovic, and S. Mohammed, "Force Sharing Problem During Gait Using Inverse Optimal Control," in International Conference on Robotics and Automation (ICRA 2023), London, United Kingdom, May. 2023, pp. 872-879. <10.1109/LRA.2022.3217398>. <hal-04063981>.
- ref_biblio
- H. Moon, R. Maiti, K. D. Sharma, Y. Amirat, P. Siarry, and S. Mohammed, "Hybrid Half-Gaussian Selectively Adaptive Fuzzy Control of an Actuated Ankle Foot Orthosis," in 2023 International Conference on Robotics and Automation (ICRA), London, United Kingdom, May. 2023. <hal-04063987>.
- ref_biblio
- H. Zilelioglu, G. Khodabandelou, A. Chibani, and Y. Amirat, "Conditional Human Activity Signal Generation and Generative Classification with a GPT-2 Model," in 2023 International Joint Conference on Neural Networks (IJCNN), Queensland, Australia, Jun. 2023, pp. 1-8. <10.1109/IJCNN54540.2023.10191464>. <hal-04063343>.
- ref_biblio
- M. Adjel, M. Sabbah, R. Dumas, N. Mansard, S. Mohammed, B. Watier, and V. Bonnet, "Multi-Modal Upper Limbs Human Motion Estimation from a Reduced Set of Affordable Sensors," in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), Detroit, United States, Oct. 2023, pp. 10926-10932. <10.1109/IROS55552.2023.10342040>. <hal-04610568>.
- ref_biblio
- M. Arbane, M. E. Khanouche, G. Khodabandelou, C. Abdelghani, and Y. Amirat, "DRSU-net: Depth-Residual Separable U-net model for Semantic Segmentation," in 2023 International Joint Conference on Neural Networks (IJCNN), Gold Coast, Australia, Jun. 2023, pp. 1-6. <10.1109/IJCNN54540.2023.10191106>. <hal-04329182>.
- ref_biblio
- M. Arbane, M. E. Khanouche, G. Khodabandelou, C. Abdelghani, and Y. Amirat, "DRSU-net: Depth-Residual Separable U-net model for Semantic Segmentation," in 2023 International Joint Conference on Neural Networks (IJCNN), Gold Coast, France, Jun. 2023, pp. 1-6. <10.1109/IJCNN54540.2023.10191106>. <hal-05545355>.
- ref_biblio
- M. Dia, G. Khodabandelou, and A. Othmani, "A Novel Stochastic Transformer-based Approach for Post-Traumatic Stress Disorder Detection using Audio Recording of Clinical Interviews," in 2023 IEEE 36th International Symposium on Computer-Based Medical Systems (CBMS), L'Aquila, Italy, Jun. 2023, pp. 700-705. <10.1109/CBMS58004.2023.00303>. <hal-04323050>.
- ref_biblio
- O. Bey, M. Chemachema, Y. Amirat, G. Fried, and S. S. Mohammed, "Direct Adaptive Fuzzy-Based Neural Network Controller for a Human Driven-Knee Joint Orthosis," in 2023 American Control Conference (ACC), San Diego, United States, May. 2023, pp. 4677-4682. <10.23919/ACC55779.2023.10155825>. <hal-04063377>.
- ref_biblio
- R. Jradi, H. Rifaï, Y. Amirat, and S. Mohammed, "Adaptive based Assist-as-needed control strategy for Ankle movement assistance," in 2023 IEEE International Conference on Robotics and Automation (ICRA), London, France, May. 2023, pp. 12672-12678. <10.1109/ICRA48891.2023.10161008>. <hal-04329229>.
2022
- ref_biblio
- F. Becanovic, J. Miller, V. Bonnet, K. Jovanovic, and S. Mohammed, "Assessing the Quality of a Set of Basis Functions for Inverse Optimal Control via Projection onto Global Minimizers," in IEEE 61st Conference on Decision and Control (CDC 2022), Cancun, Mexico, Dec. 2022, pp. 7598-7605. <10.1109/CDC51059.2022.9993342>. <hal-04063395>.
- ref_biblio
- H. Moon, A. Boubezoul, L. Oukhellou, Y. Amirat, and S. Mohammed, "Online Human Intention Detection through Machine-learning based Algorithm for the Control of Lower-limbs Wearable Robot," in 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), Ginowan, Japan, Nov. 2022, pp. 809-814. <10.1109/Humanoids53995.2022.10000150>. <hal-04063399>.
- ref_biblio
- H. Zilelioglu, I. Ocnarescu, G. Khodabandelou, A. Chibani, C. Bataille, J. Mlynarczyk, Y. Amirat, and S. Le Bars, "Modelling Companion Animals' Well-being based on Activity Recognition and Biological Rhythms Monitoring," in 2022 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, France, Dec. 2022, pp. 1816-1818. <10.1109/CSCI58124.2022.00324>. <hal-04610602>.
- ref_biblio
- K. Moulouel, A. Chibani, H. Abdelkawy, and Y. Amirat, "Hybrid approach for anticipating human activities in Ambient Intelligence environments," in 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), Mexico City, Mexico, Aug. 2022, pp. 2006-2011. <10.1109/CASE49997.2022.9926669>. <hal-04063306>.
- ref_biblio
- K. Moulouel, M. Arbane, A. Chibani, G. Khodabandelou, and Y. Amirat, "Anticipating Human Activities using a Stream Reasoning framework in Partially Observable environments," in Trends and advances in integrating machine learning and automated reasoning for intelligent robots and systems- AI&R, Workshop at the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2022,, Philadelphia, United States, May. 2022. <hal-04063991>.
- ref_biblio
- K. Moulouel, M. Arbane, A. Chibani, G. Khodabandelou, and Y. Amirat, "Stream Reasoning approach for Anticipating Human Activities in Ambient Intelligence environments," in 2022 IEEE 34th International Conference on Tools with Artificial Intelligence (ICTAI), Washignton DC, United States, Oct. 2022. <hal-04063393>.
- ref_biblio
- S. M. Modaresi, A. Osmani, M. Razzazi, and A. Chibani, "Multimodal Evaluation Method for Sound Event Detection," in ICASSP 2022 - 2022 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Singapore, Singapore, May. 2022, pp. 1026-1030. <10.1109/ICASSP43922.2022.9746906>. <hal-04063311>.
- ref_biblio
- S. Modaresi, A. Osmani, M. Razzazi, and A. Chibani, "Uniform Evaluation of Properties in Activity Recognition," in Advances in Knowledge Discovery and Data Mining: 26th Pacific-Asia Conference, PAKDD 2022, Chengdu, China, May. 2022, pp. 83-95. <10.1007/978-3-031-05936-0\_7>. <hal-04063325>.
- ref_biblio
- Y. Cao, J. Huang, X. Li, M. Zhang, C. Xiong, S. Mohammed, Y. Zhu, and Y. Hasegawa, "Metabolic Efficiency Improvement of Human Walking by Shoulder Stress Reduction through Load Transfer Backpack," in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, Oct. 2022, pp. 3934-3939. <10.1109/IROS47612.2022.9981129>. <hal-04063400>.
2021
- ref_biblio
- I. Jammeli, A. Chemori, S. Elloumi, and S. Mohammed, "A Novel LQR-Based Cascaded Control Scheme of a Powered Knee Joint Orthosis for Rehabilitation," in ICSC 2021 - 9th International Conference on Systems and Control, Caen, France, Nov. 2021, pp. 361-366. <10.1109/ICSC50472.2021.9666730>. <lirmm-03523073>.
- ref_biblio
- P.-G. Jung, W. Huo, H. Moon, Y. Amirat, and S. Mohammed, "A Novel Gait Phase Detection Algorithm for Foot Drop Correction through Optimal Hybrid FES-Orthosis Assistance," in 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi'an, China, May. 2021, pp. 10391-10397. <10.1109/ICRA48506.2021.9561497>. <hal-04063401>.
2020
- ref_biblio
- A. Achroufene, A. Chibani, and Y. Amirat, "Using Dempster-Shafer Theory for RSS-based Indoor Localization," in 2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Glasgow, United Kingdom, Jul. 2020, pp. 1-8. <10.1109/FUZZ48607.2020.9177840>. <hal-04063562>.
- ref_biblio
- A. Nguyen, V. Bonnet, and S. Mohammed, "Direct Collocation-Based Optimal Controller for Multi-modal Assistance: Simulation Study," in Wearable Robotics: Challenges and Trends, J.C. Moreno, J. Masood, Y. Schneider, C. Maufroy, J.L. Pons, Eds., Proc. Of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Biosystems & Biorobotics series, vol. 27, Springer,, Online, France, Oct. 2020, pp. 295-300. <10.1007/978-3-030-69547-7\_48>. <hal-04063486>.
- ref_biblio
- C. Canchola-Hernandez, H. Rifai, Y. Amirat, and S. Mohammed, "Ankle Dorsiflexion Assistance Using Adaptive Functional Electrical Stimulation and Actuated Ankle Foot Orthosis," in Wearable Robotics: Challenges and Trends, J.C. Moreno, J. Masood, Y. Schneider, C. Maufroy, J.L. Pons, Eds., Proc. Of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Biosystems & Biorobotics series, vol. 27, Springer, Online, France, Oct. 2020, pp. 319-323. <10.1007/978-3-030-69547-7\_52>. <hal-04063489>.
- ref_biblio
- F. Attal, Y. Amirat, A. Chibani, and S. Mohammed, "Human Gait Phase Recognition using a Hidden Markov Model Framework," in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, United States, Oct. 2020, pp. 10299-10304. <10.1109/IROS45743.2020.9341380>. <hal-04063405>.
- ref_biblio
- P.-G. Jung, Y. Amirat, and S. Mohammed, "Design of a Capacitance Sensor for Human Intention Detection of Daily Living Activities," in 21th World Congress of the International Federation of Automatic Control, IFAC 2020, IFAC-PapersOnLine, vol. 53, no. 2, Berlin, Germany, Jul. 2020, pp. 8525-8530. <10.1016/j.ifacol.2020.12.1417>. <hal-04063558>.
- ref_biblio
- R. Mallat, V. Bonnet, G. Venture, R. Dumas, M. Khalil, and S. Mohammed, "Dynamics Assessment and Minimal Model of an Orthosis-Assisted Knee Motion," in 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New-York, United States, Nov. 2020, pp. 352-357. <10.1109/BioRob49111.2020.9224432>. <hal-03046696>.
- ref_biblio
- R. Mojarad, F. Attal, A. Chibani, and Y. Amirat, "A Context-aware Hybrid Framework for Human Behavior Analysis," in 2020 IEEE 32nd International Conference on Tools with Artificial Intelligence (ICTAI), Baltimore, United States, Nov. 2020, pp. 460-465. <10.1109/ICTAI50040.2020.00078>. <hal-04063554>.
- ref_biblio
- R. Mojarad, F. Attal, A. Chibani, and Y. Amirat, "A Hybrid Context-aware Framework to Detect Abnormal Human Daily Living Behavior," in 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, United Kingdom, Jul. 2020, pp. 1-8. <10.1109/IJCNN48605.2020.9206930>. <hal-04063334>.
- ref_biblio
- R. Mojarad, F. Attal, A. Chibani, and Y. Amirat, "Context-aware Adaptive Recommendation System for Personal Well-being Services," in 2020 IEEE 32nd International Conference on Tools with Artificial Intelligence (ICTAI), Baltimore, United States, Nov. 2020, pp. 192-199. <10.1109/ICTAI50040.2020.00039>. <hal-04063551>.
- ref_biblio
- R. Mojarad, F. Attal, A. Chibani, and Y. Amirat, "Context-aware Human Activity Recognition," in 2020 International Conference on Robotics and Automation (ICRA), Paris, France, May. 2020. <hal-04063997>.
- ref_biblio
- R. Mojarad, Y. Amirat, and A. Chibani, "A Context-based Approach to Detect Abnormal Human Behaviors in Ambient Intelligent Systems," in European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases, ECML-PKDD 2020,, Virtual conference, France, Sep. 2020, pp. 89-104. <10.1007/978-3-030-67667-4\_6>. <hal-04063557>.
- ref_biblio
- T. Madani, and K. Djouani, "Robust Adaptive Sliding Mode Controller for Wearable Robots," in 21th World Congress of the International Federation of Automatic Control, IFAC 2020, IFAC-PapersOnLine, vol. 53, no. 2, Berlin, Germany, Jul. 2020, pp. 3861-3866. <10.1016/j.ifacol.2020.12.2078>. <hal-04063547>.
- ref_biblio
- W. Huo, M. A. Alouane, Y. Amirat, and S. Mohammed, "Force Control of SEA-based Exoskeletons for Multimode Human-Robot Interactions," in 2020 International Conference on Robotics and Automation (ICRA), Paris, France, May. 2020. <hal-04063995>.
2019
- ref_biblio
- A. Jebri, T. Madani, and K. Djouani, "Adaptive Continuous Integral-Sliding-Mode Controller for Wearable Robots: Application to an Upper Limb Exoskeleton," in 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, Canada, Jun. 2019, pp. 766-771. <10.1109/ICORR.2019.8779431>. <hal-04063568>.
- ref_biblio
- A. Jebri, T. Madani, and K. Djouani, "Neural Adaptive Integral-Sliding-Mode Controller with a SSVEP-based BCI for Exoskeletons," in 2019 19th International Conference on Advanced Robotics (ICAR), Belo Horizonte, Brazil, Dec. 2019, pp. 87-92. <10.1109/ICAR46387.2019.8981615>. <hal-04063566>.
- ref_biblio
- H. Kordestani, R. Mojarad, A. Chibani, A. Osmani, Y. Amirat, K. Barkaoui, and W. Zahran, "Hapicare: A Healthcare Monitoring System with Self-adaptive Coaching Using Probabilistic Reasoning," in ACS/IEEE International Conference on Computer Systems and Applications - AICCSA 2019, Abu Dhabi, United Arab Emirates, Nov. 2019, pp. 1-8. <10.1109/AICCSA47632.2019.9035291>. <hal-02475906>.
- ref_biblio
- M. E. Khanouche, N. Atmani, A. Cherifi, A. Chibani, E. Matson, and Y. Amirat, "QoS-Aware Agent Capabilities Composition in HARMS Multi-agent Systems," in Demazeau, Y., Matson, E., Corchado, J., De la Prieta, F. (eds) Advances in Practical Applications of Survivable Agents and Multi-Agent Systems: The PAAMS Collection. PAAMS 2019. Lecture Notes in Computer Science(), Avila, Spain, Jun. 2019, pp. 127-138. <10.1007/978-3-030-24209-1\_11>. <hal-04063571>.
- ref_biblio
- R. Mallat, M. Khalil, G. Venture, V. Bonnet, and S. Mohammed, "Human-Exoskeleton Joint Misalignment: A Systematic Review," in 2019 Fifth International Conference on Advances in Biomedical Engineering (ICABME), Tripoli, Lebanon, Oct. 2019, pp. 1-4. <10.1109/ICABME47164.2019.8940321>. <hal-04063575>.
- ref_biblio
- V. Bonnet, M. Gautier, R. Dumas, S. Mohammed, T. Robert, G. Venture, and P. Fraisse, "Overview on dynamic identification methods of floating base anthropomorphic structures," in 44th Congress of the Société de Biomécanique, Poitiers, France, Oct. 2019, pp. S471-S473. <10.1080/10255842.2020.1714985>. <hal-03673695>.
2018
- ref_biblio
- F. Sebbak, S. Bouznad, F. Benhammadi, A. A. Chibani, and Y. Amirat, "Context Awareness in Uncertain Pervasive Computing and Sensors Environment," in Proc. Of the 21th International conference on information fusion, FUSION 2018, Cambridge, United Kingdom, Jul. 2018, pp. 1-5. <hal-01865401>.
- ref_biblio
- G. Ding, W. Huo, J. Huang, Y. Amirat, and S. Mohammed, "Robust and Safe Control of a Knee Joint Orthosis," in 2018 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Shenyang, China, Aug. 2018, pp. 343-348. <10.1109/IISR.2018.8535984>. <hal-04063582>.
- ref_biblio
- H. Abdelkawy, N. Ayari, A. A. Chibani, Y. Y. Amirat, and F. Attal, "Deep HMResNet Model for Human Activity-Aware Robotic Systems," in Proc. of the AAAI 2018 Fall Symposium Series, Arlington, United States, Oct. 2018. <hal-01865357>.
- ref_biblio
- H. Abdelkawy, S. Fiorini, A. A. Chibani, N. Ayari, and Y. Y. Amirat, "Deep CNN and Probabilistic DL Reasoning for Contextual Affordances," in Proc. of the AAAI 2018 Fall Symposium Series, Arlington, United States, Oct. 2018. <hal-01865362>.
- ref_biblio
- M.-A. Alouane, H. H. Rifai, Y. Y. Amirat, and S. S. Mohammed, "Cooperative Control for Knee Joint Flexion-Extension Movement Restoration," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain, Oct. 2018, pp. 5175-5180. <hal-01865369>.
- ref_biblio
- M.-A. Alouane, W. Huo, H. Rifai, Y. Y. Amirat, and S. Mohammed, "Hybrid FES-Exoskeleton Controller to Assist Sit-To-Stand movement," in Proc. Of the 2nd IFAC Conference on Cyber-Physical & Human-Systems, CPHS 2018, Miami, United States, Dec. 2018, pp. 352-357. <hal-01966583>.
- ref_biblio
- N. Khoury, F. Attal, Y. Y. Amirat, A. A. Chibani, and S. S. Mohammed, "CDTW-based classification for Parkinson's Disease diagnosis," in Proc. Of the 26th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, ESANN 2018, Bruges, Belgium, Apr. 2018, pp. 621-626. <hal-01539391>.
- ref_biblio
- R. Mallat, V. Bonnet, M. Khalil, and S. Mohammed, "Toward an Affordable Multi-Modal Motion Capture System Framework for Human Kinematics and Kinetics Assessment," in Wearable Robotics: Challenges and Trends, M.C. Carrozza, S. Micera, J.L. Pons, Eds., Proc. Of the 4th International Symposium on Wearable Robotics, WeRob2018, Pisa, Italy, Biosystems & Biorobotics series, vol. 22, Springer, Pisa, Italy, Oct. 2018, pp. 65-69. <10.1007/978-3-030-01887-0\_13>. <hal-04063578>.
- ref_biblio
- R. Mallat, V. Bonnet, W. Huo, P. Karasinski, Y. Y. Amirat, S. S. Mohammed, and K. Mohamad, "Human-Exoskeleton System Dynamics Identification Using Affordable Sensors," in Proc. Of the IEEE International Conference on Robotics and Automation, ICRA 2018, Brisbane, Australia, May. 2018, pp. 6759-6765. <hal-01847147>.
- ref_biblio
- R. Mojarad, F. Attal, A. A. Chibani, S. Fiorini, and Y. Y. Amirat, "Hybrid approach for Human Activity Recognition by Ubiquitous Robots," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain, Oct. 2018, pp. 5660-5665. <hal-01865376>.
- ref_biblio
- T. Magano, K. Djouani, A. Kurien, and A. Chibani, "A Fuzzy based Diagnostic Agent for Context Aware Patient Monitoring," in The 9th International Conference on Emerging Ubiquitous Systems and Pervasive Networks (EUSPN-2018) / The 8th International Conference on Current and Future Trends of Information and Communication Technologies in Healthcare (ICTH-2018) , Procedia Computer Science, vol. 141, Elsevier, Leuven, Belgium, Nov. 2018, pp. 421-427. <10.1016/j.procs.2018.10.174>. <hal-04063626>.
- ref_biblio
- V. Arnez-Paniagua, H. H. Rifai, Y. Amirat, M. Guedira, J. M. Gracies, and S. Mohammed, "Modified Adaptive Control of an Actuated Ankle Foot Orthosis to Assist Paretic Patients," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain, Oct. 2018, pp. 2311-2317. <hal-01865366>.
- ref_biblio
- W. Huo, V. Arnez-Paniagua, M. Ghedira, Y. Amirat, J. M. Gracies, and S. Mohammed, "Adaptive FES Assistance Using a Novel Gait Phase Detection Approach," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2018, Madrid, Spain, Oct. 2018, pp. 5187-5193. <hal-01865372>.
- ref_biblio
- Y. Y. Amirat, "Robotique d’assistance: Les exosquelettes," in Le rendez-vous de l'enseignement supérieur et de la recherche du département du Val de Marne, Vitry-sur-Seine, France, Jun. 2018. <hal-01865413>.
2017
- ref_biblio
- A. A. Chibani, "Medolution: a European Research Project for enhancing the self-management and follow up of Parkinson Patients," in 4th IEEE International Conference on Advances in Biomedical Engineering, ICABME 2017, Beirut, Lebanon, Oct. 2017. <hal-01865424>.
- ref_biblio
- A. Osmani, M. Hamidi, and A. A. Chibani, "Machine Learning Approach for Infant Cry Interpretation," in Proc. Of the 29th IEEE International Conference on Tools with Artificial Intelligence, ICTAI 2017, Boston, United States, Nov. 2017, pp. 182-186. <hal-01878872>.
- ref_biblio
- J.-I. Olszewska, M. Barreto, J. Bermejo-Alonso, J. Carbonera, A. Chibani, S. Fiorini, P. Goncalves, M. Habib, A. Khamis, A. Olivares, E. Pignaton De Freitas, E. Prestes, S.-V. Ragavan, S. Redfield, R. Sanz, B. Spencer, and H. Li, "Ontology for autonomous robotics," in Proc. Of the 26th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2017, Lisbon, Portugal, Aug. 2017, pp. 189-194. <hal-01878858>.
- ref_biblio
- K. Safi, S. S. Mohammed, Y. Y. Amirat, and M. Khalil, "Postural stability analysis- A review of technics and methods for human stability assessment," in Proc. Of the 4th IEEE International Conference on Advances in Biomedical Engineering , ICABME 2017, Beirut, Lebanon, Oct. 2017. <hal-01865422>.
- ref_biblio
- M.-A. Gomez, A. A. Chibani, Y. Y. Amirat, and E.-T. Matson, "Self-healing Mechanism over the Cloud on Interaction Layer for AALs Using HARMS," in Proc. Of the 15th International Conference on Practical Applications of Agents and Multi-Agent Systems, PAAMS 2017, Porto, Portugal, Jun. 2017, pp. 264-267. <hal-01878881>.
- ref_biblio
- N. Ayari, A. A. Chibani, Y. Y. Amirat, and G. Fried, "Contextual Knowledge Representation and Reasoning Models for Autonomous Robots," in Proc. of the AAAI 2017 Fall Symposium Series, Arlington, United States, Nov. 2017, pp. 246-253. <hal-01539398>.
- ref_biblio
- N. Ayari, H. Abdelkawy, A. Chibani, and Y. Y. Amirat, "Towards Semantic Multimodal Emotion Recognition for Enhancing Assistive Services in Ubiquitous Robotics," in Proc. Of the AAAI 2017 Fall Symposium Series, Arlington, United States, Nov. 2017, pp. 2-9. <hal-01637275>.
- ref_biblio
- R. Mallat, V. V. Bonnet, M. Khalil, and S. S. Mohammed, "Dynamic identification of a human-exoskeleton-system," in Proc. Of the 4th IEEE International Conference on Advances in Biomedical Engineering, ICABME 2017, Beirut, Lebanon, Oct. 2017, pp. 1-4. <hal-01865409>.
- ref_biblio
- S. Bouznad, A. A. Chibani, Y. Y. Amirat, L. Sabri, E. Prestes, F. Sebbak, and S. Fiorini, "Context-Aware Monitoring Agents for Ambient Assisted Living Applications," in Proc. Of the 13th European Conference on Ambient Intelligence, AmI 2017, Malaga, Spain, 2017, pp. 225-240. <hal-01539387>.
- ref_biblio
- S. Bouznad, F. Sebbak, F. Benhammadi, Y. Y. Amirat, and A. A. Chibani, "Generalized Fuzzy Soft Set Based Fusion Strategy for Activity Classification in Smart Home," in Proc. Of the IEEE International Conference on Fuzzy Systems, FUZZ-IEEE 2017, Naples, Italy, Jul. 2017, pp. 1-6. <hal-01539389>.
- ref_biblio
- S. Bouznad, F. Sebbak, F. Benhammadi, Y. Y. Amirat, and A. A. Chibani, "Multi-observer Decision Making Approach Using Power Fuzzy Soft Sets," in Proc. Of the IEEE International Conference on Fuzzy Systems, FUZZ-IEEE 2017, Naples, Italy, Jul. 2017, pp. 1-6. <hal-01539390>.
- ref_biblio
- S. S. Mohammed, "Gait Characterization for Mobility Assistance Using Wearable Robots. Workshop ''Wearable Technology for Gait Assessments in Healthy Individuals and Patients with Movement Disorders''," in IEEE International Conference on Rehabilitation Robotics (ICORR), London, United Kingdom, Jul. 2017. <hal-01865428>.
- ref_biblio
- S. S. Mohammed, "Human gait characterization and movement assistance using wearable robots," in 4th IEEE International Conference on Advances in Biomedical Engineering , ICABME 2017, Beirut, Lebanon, Oct. 2017. <hal-01865419>.
- ref_biblio
- S. S. Mohammed, "Mobility Assistance Using Wearable Robots", Workshop ''Assistance and Service Robotics in a Human Environment''," in IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, Canada, Sep. 2017. <hal-01865431>.
- ref_biblio
- S. S. Mohammed, and Y. Y. Amirat, "Commandes des exosquelettes des membres inférieurs pour l’assistance à la mobilité," in Robotique Médicale, Journée exosquelettes, organisée par le groupe de travail du GDR Robotique, Paris, France, 2017. <hal-01682018>.
- ref_biblio
- V. Arnez, H. Rifai, Y. Y. Amirat, and S. S. Mohammed, "Adaptive Control of an Actuated-Ankle-Foot-Orthosis," in Proc. Of the IEEE International Conference on Rehabilitation Robotics, ICORR 2017, London, United Kingdom, 2017, pp. 1584-1589. <hal-01539388>.
- ref_biblio
- V. Arnez-Paniagua, H. Rifai, S. S. Mohammed, and Y. Y. Amirat, "Adaptive Control of an Actuated Ankle Foot Orthosis for Foot-Drop Correction," in Proc. Of the 20th World Congress of the International Federation of Automatic Control, IFAC 2017, Toulouse, France, 2017, pp. 1420-1425. <hal-01539392>.
- ref_biblio
- Y. Y. Amirat, "Recherches autour des technologies pour la santé," in Séminaire scientifique " Santé - Société - Environnement " de l’UPEC, Créteil, France, Dec. 2017. <hal-01865416>.
- ref_biblio
- Y. Y. Amirat, "Robotique d’assistance," in séminaire sur les activités les laboratoires de recherche rattachés au GDR Robotique dans le cadre du salon INNOROBO, Paris, France, May. 2017. <hal-01865433>.
2016
- ref_biblio
- H. Rifaï, M. S. Ben Abdessalem, A. Chemori, S. Mohammed, and Y. Amirat, "Augmented L1 adaptive control of an actuated knee joint exoskeleton: From design to real-time experiments," in ICRA: International Conference on Robotics and Automation, Stockholm, Sweden, May. 2016, pp. 5708-5714. <10.1109/ICRA.2016.7487794>. <lirmm-01723920>.
- ref_biblio
- K. Safi, E. Hutin, S. S. Mohammed, M. Albertsen, E. Delechelle, Y. Y. Amirat, M. Khalil, and J.-M. Gracies, "Human Static Postures Analysis using Empirical Mode Decomposition," in Proc. Of the IEEE Engineering in Medicine and Biology Society of the IEEE Engineering in Medicine and Biology Society, EMBC'16, Orlando, Florida, United States, 2016, pp. 3765-3768. <hal-01539395>.
- ref_biblio
- R. Menasri, B. B. Daachi, H. Oulhadj, A. Nakib, and P. .. Siarry, "Optimisation à deux niveaux pour les problèmes d’interpolation en robotique," in 17ème congrès de la Société Française de Recherche Opérationnelle et d’Aide à la Décision, ROADEF 2016, Résumé sur clé USB,, Compiègne, France, Feb. 2016. <hal-01568286>.
- ref_biblio
- V. Arnez-Paniagua, W. Huo, I. Colorado-Cervantes, S. S. Mohammed, and Y. Y. Amirat, "A Hybrid Approach towards Assisting Ankle Joint of Paretic Patients," in Proc. of the 20th International Functional Electrical Stimulation Society conference, IFESS 2016, La Grande-Motte, France, 2016. <hal-01539782>.
- ref_biblio
- W. Huo, S. S. Mohammed, Y. Y. Amirat, and K. Kong, "Active Impedance Control of a Lower Limb Exoskeleton to Assist Sit-to-Stand Movement," in Proc. Of the IEEE International Conference on Robotics and Automation, ICRA 2016, Stockholm, Sweden, 2016, pp. 3530-3536. <hal-01539394>.
- ref_biblio
- W. Huo, S. S. Mohammed, and Y. Y. Amirat, "Walking Assistance through Impedance Control of a Lower-limb Exoskeleton," in Proc. Of the 3rd International Conference on Neuro-Rehabilitation, ICNR 2016, Segovia, Spain, 2016, pp. 711-715. <hal-01539783>.
- ref_biblio
- Y. Y. Amirat, "Ambient Intelligence-AAL (Ambient-Assisted Living): principles & challenges," in Journée d’Etude sur les Systèmes Intelligents Ambiants, Ecole Polytechnique d’Alger, Algeria, 2016. <hal-01682021>.
2015
- ref_biblio
- A. A. Chibani, and Y. Y. Amirat, "Hybrid Reasoning Middleware for Cloud Network Robots," in OMG Meeting,, Berlin, Germany, 2015. <hal-01682028>.
- ref_biblio
- B. B. Daachi, T. T. Madani, M. E. Daachi, and K. Djouani, "Model Reference Adaptive Control Using a Neural Compensator to Drive an Active Knee Joint Orthosis," in Proc. Of the IEEE International Conference on Rehabilitation Robotics, ICORR 2015, Singapour, Singapore, 2015, pp. 362-367. <hal-01539397>.
- ref_biblio
- M. O. Ajayi, K. Djouani, and Y. Hamam, "Bounded control of a full-exoskeleton device with four (4) Degree of Freedom," in Proc of the IEEE International Conference on Robotics and Biomimetics, ROBIO 2015, Zhuhai, China, 2015, pp. 2425-2430. <hal-01682003>.
- ref_biblio
- R. Menasri, B. B. Daachi, H. Oulhadj, A. Nakib, and P. .. Siarry, "Optimisation de la planification de trajectoires à jerk minimum via l’optimisation par essaim particulaires," in 16ème congrès de la Société Française de Recherche Opérationnelle et d’Aide à la Décision ROADEF 2015, Résumé sur clé USB, Marseille, France, Feb. 2015. <hal-01568288>.
- ref_biblio
- S. F. M. Mambo, K. Djouani, Y. Hamam, B. J. V. Wyk, and P. .. Siarry, "Lung CT image registration using regular step gradient descent optimisation algorithm," in Proc. Of the International Conference on Communication and Information Processing, ICCIP 2015, Tokyo, Japan, 2015. <hal-01682004>.
- ref_biblio
- S. O. Onyango, Y. Hamam, K. Djouani, and B. B. Daachi, "Identification of wheelchair user steering behaviour within indoor environments," in Proc of the IEEE International Conference on Robotics and Biomimetics, ROBIO 2015, Zhuhai, China, 2015, pp. 2283-2288. <hal-01682001>.
- ref_biblio
- V. Damerjian, E. Deléchelle, O. Tankyevych, A. Guellich, T. Damy, and E. Petit, "Speckle Characterization by Fractional Parameters: preliminary results before application to the discrimination of cardiopathies from echocardiographic images," in Journées Recherche en Imagerie et Technologies pour la Santé, RITS 2015, Dourdan, France, 2015. <hal-01682031>.
- ref_biblio
- W. Huo, S. S. Mohammed, and Y. Y. Amirat, "Observer-Based Active Impedance Control of a Knee-Joint Assistive Orthosis," in Proc. Of the IEEE International Conference on Rehabilitation Robotics, ICORR 2015, Singapour, Singapore, 2015, pp. 313-318. <hal-01539396>.
- ref_biblio
- Y. Y. Amirat, "Assistive robotics," in 3rd International Conference on Advances in Biomedical Engineering (ICABME 2015), Beirut, Lebanon, 2015, pp. 16-18. <hal-01682027>.
2014
- ref_biblio
- A. A. Chibani, "Cloud Robotics & IoT- Bringing More Intelligence to Objects and Robots," in the Assistance and Service Robotics in a Human Environment, Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, Chicago, United States, 2014. <hal-01539788>.
- ref_biblio
- A. A. Chibani, "Commonsense Reasoning for Service Robots based on Ontologies," in the Standardized Knowledge Representation and Ontologies for Robotics and Automation, Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS, IROS 2014, Chicago, United States, 2014. <hal-01539787>.
- ref_biblio
- A. Melingui, R. Merzouki, B. Mbede, C. Escande, B. Daachi, and N. Benoudjit, "Qualitative approach for inverse kinematic modeling of a Compact Bionic Handling Assistant trunk," in 2014 International Joint Conference on Neural Networks (IJCNN), Beijing, France, Jul. 2014. <10.1109/IJCNN.2014.6889947>. <hal-01694237>.
- ref_biblio
- A. Melingui, R. Merzouki, J. B. Mbede, C. Escande, B. B. Daachi, and N. Benoudjit, "Qualitative approach for inverse kinematic modeling of a Compact Bionic Handling Assistant trunk," in Proc. Of the IEEE International Joint Conference on Neural Networks (IJCNN 2014), Beijing, China, 2014, pp. 754-761. <hal-01539401>.
- ref_biblio
- B. B. Daachi, T. T. Madani, M. E. Daachi, and K. Djouani, "MLPNN adaptive controller based on a reference model to drive an actuated lower limb orthosis," in Proc. Of the 5th IEEE RAS & EMBS Biomedical Robotics and Biomechatronics, BIOROB 2014, São Paulo, Brazil, 2014, pp. 638-643. <hal-01539404>.
- ref_biblio
- E. Baek, S. Song, S. Oh, S. S. Mohammed, D. Jeon, and K. Kong, "A Motion Phase-based Hybrid Assistive Controller for Lower Limb Exoskeletons," in Proc. Of the13th IEEE International Workshop on Advanced Motion Control, AMC 2014, Yokohama, Japan, 2014, pp. 197-202. <hal-01539402>.
- ref_biblio
- E. Baek, S.-K. Song, S. Oh, S. S. Mohammed, D. Jeon, and K. Kong, "A generalized control framework of assistive controllers for lower limb exoskeletons," in Proc. Of the IEEE International Conference on Robotics and Automation, ICRA 2014, Hong Kong, China, 2014, pp. 1505-1509. <hal-01539400>.
- ref_biblio
- F. Sebbak, F. Benhammadi, S. Bouznad, A. A. Chibani, and Y. Y. Amirat, "An Evidential Fusion Rule for Ambient Intelligence for Activity Recognition," in Proc. Of the 3rd International Conference on Belief Functions (BELIEF 2014),, Oxford, United Kingdom, 2014, pp. 356-364. <hal-01539406>.
- ref_biblio
- M. Dakkak, B. B. Daachi, A. Nakib, and P. .. Siarry, "Multi-layer perceptron neural network and nearest neighbor approaches for indoor localization," in Proc. Of the IEEE International Conference on Systems, Man and Cybernetics, IEEE SMC 2014, San Diego, CA, United States, 2014, pp. 1385-1392. <hal-01539405>.
- ref_biblio
- M. O. Ajayi, K. Djouani, and Y. Hamam, "Analysis of Knee-Ankle Orthosis Modelling: An Inverse Dynamics Approach Using Adaptive Coupled Oscillator," in PProc. Of the 4th International Conference on Simulation, Modeling, and Programming for Autonomous Robots,, Bergamo, Italy, 2014, pp. 122-133. <hal-01682009>.
- ref_biblio
- M. O. Ajayi, K. Djouani, and Y. Hamam, "Shank-foot trajectory control: A forward dynamic approach using computed-torque control," in Proc. Of the IEEE International Conference on Humanoid Robots, Madrid, Spain, 2014, pp. 652-657. <hal-01682008>.
- ref_biblio
- N. Ayari, A. A. Chibani, and Y. Y. Amirat, "Ubiquitous robots and smart objects with Semantic Reasoning Capabilities," in Experimenting in HRI for Priming Real-World Setups, Innovations and Products, Workshop at the 9th ACM/IEEE International Conference on Human-Robot Interaction, HRI 2014, Bielefeld, Germany, 2014. <hal-01539785>.
- ref_biblio
- R. Menasri, H. Oulhadj, B. B. Daachi, A. Nakib, P. Siarry, and G. Hains, "Optimisation à deux niveaux pour la planification de trajectoires des bras manipulateurs redondants," in 15ème congrès de la Société Française de Recherche Opérationnelle et d’Aide à la Décision ROADEF 2014, Résumé sur clé USB, Bordeaux, France, Feb. 2014. <hal-01568290>.
- ref_biblio
- R. Menasri, H. Oulhadj, B. B. Daachi, A. Nakib, and P. .. Siarry, "A genetic algorithm designed for robot trajectory planning," in Proc. Of the IEEE International Conference on Systems, Man and Cybernetics, SMC 2014, San Diego, United States, 2014, pp. 228 - 233. <hal-01539403>.
- ref_biblio
- R. Menasri, H. Oulhadj, B. B. Daachi, A. Nakib, and P. .. Siarry, "Smooth trajectory planning for robot using Particle Swarm Optimization," in Proc. Of the International Conference on Swarm Intelligence Based Optimization, ICSIBO 2014, Revised Selected Papers, Mulhouse, France, 2014, pp. 50-59. <hal-01568105>.
- ref_biblio
- T. T. Madani, B. B. Daachi, and K. Djouani, "Adaptive controller based on uncertainty parametric estimation using backstepping and sliding mode techniques: Application to an active orthosis," in Proc. Of the 13th European Control Conference, ECC 2014, Strasbourg, France, 2014, pp. 1869-1874. <hal-01539399>.
- ref_biblio
- T. T. Madani, B. B. Daachi, and K. Djouani, "Finite-time Control of an Actuated Orthosis Using Fast Terminal Sliding Mode," in Proc. Of the 19th World Congress of the International Federation of Automatic Control, IFAC 2014, Cap Town, South Africa, 2014, pp. 4607-4612. <hal-01539407>.
- ref_biblio
- Y. Y. Amirat, and A. A. Chibani, "Robotique Ubiquitaire. Principes, état de l’art, challenges," in 10èmes journées francophones Mobilité et Ubiquité, UbiMob 2014, Sophia Antipolis, France, Jun. 2014. <hal-01539786>.
2013
- ref_biblio
- F. Sebbak, F. Benhammadi, A. A. Chibani, Y. Y. Amirat, and A. Mokhtari, "New Evidence Combination Rules for Activity Recognition in Smart Home," in Proc. Of the 16th International conference on information fusion, FUSION 2013, Istanbul, Turkey, Turkey, Jul. 2013, pp. 46-52. <hal-01539408>.
- ref_biblio
- F. Sebbak, F. Benhammadi, A. Chibani, Y. Amirat, and A. Mokhtari, "New Evidence Combination Rules for Activity Recognition in Smart Home," in FUSION 2013, Istanbul, Turkey, Jul. 2013, pp. 46-52. <hal-00919400>.
- ref_biblio
- F. Sebbak, F. Benhammadi, A. Mokhtari, A. A. Chibani, and Y. Y. Amirat, "Evidence Combination Based on CSP Modeling," in Proc. Of the 16th International conference on information fusion, FUSION 2013, Istanbul, Turkey, 2013, pp. 1111-1118. <hal-01539409>.
- ref_biblio
- H. Choi, K. Kong, S. S. Mohammed, D. Jeon, and Y. Y. Amirat, "Recognition of Daily-life Motions Based on a Wearable Body Sensor Network," in Assistance and Service Robotics in a Human Environment, Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), Tokyo, Japan, 2013. <hal-01539414>.
- ref_biblio
- L. Bennacer, L. Ciavaglia, S. Ghamri-Doudane, A. A. Chibani, Y. Y. Amirat, and A. Mellouk, "Scalable and Fast Root Cause Analysis Using Inter Cluster Inference," in Proc. Of the IEEE International Conference on Communications, ICC 2013, Budapest, Hungary, Jun. 2013, pp. 1-6. <hal-01676592>.
- ref_biblio
- L. Miao, K. Djouani, B. Van Wyk, and Y. Hamam, "Performance Evaluation of IEEE 802.11p MAC Protocol in VANETs Safety Applications," in WCNC 2013, Shanghai, China, Apr. 2013, pp. 1663-1668. <hal-00919457>.
- ref_biblio
- M. Dakkak, B. B. Daachi, A. Nakib, and P. .. Siarry, "Classification optimale pour la localisation en environnement fermé : techniques des réseaux de neurones et des plus proches voisins," in 14ème congrès de la Société Française de Recherche Opérationnelle et d’Aide à la Décision, ROADEF 2013, Résumé (2 pages), Troyes, France, 2013, pp. 13-15. <hal-01682059>.
- ref_biblio
- M. Hilia, A. A. Chibani, K. Djouani, and Y. Y. Amirat, "Formal Specification and Verification For Ubiquitous Robotic Services Composition," in RSS 2013, Berlin, Germany, Jul. 2013. <hal-00919385>.
- ref_biblio
- N. Ayari, A. A. Chibani, Y. Y. Amirat, and E.-T. Matson, "Towards the design of intelligent assistive services by integrating NKRL and the HARMS model," in Assistance and Service Robotics in a Human Environment, Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), Tokyo, Japan, 2013. <hal-01539411>.
- ref_biblio
- N. Ayari, A. A. Chibani, and Y. Y. Amirat, "Semantic Management of Human-Robot Interaction In Ambient Intelligence using N-ary ontologies," in ICRA 2013, Karlsruhe, Germany, May. 2013, pp. 1164-1171. <hal-00919392>.
- ref_biblio
- R. Menasri, A. Nakib, H. Oulhadj, B. B. Daachi, P. .. Siarry, and G. Hains, "Path planning for redundant manipulators using metaheuristic for bilevel optimization and maximum of manipulability," in Proc. Of the IEEE Int. Conf. on Robotics and Biomimetics, ROBIO 2013, Shenzhen, China, 2013, pp. 145-150. <hal-01539412>.
- ref_biblio
- S. S. Mohammed, J. Huang, H. Rifai, and Y. Y. Amirat, "Nonlinear Disturbance Observer Based Sliding Mode Control of a Human-Driven Knee Joint Orthosis," in Assistance and Service Robotics in a Human Environment, Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), Tokyo, Japan, 2013. <hal-01539410>.
- ref_biblio
- W. Hassani, S. S. Mohammed, H. Rifai, and Y. Y. Amirat, "EMG Based Approach for Wearer-centered Control of a Knee Joint Actuated Orthosis," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), Tokyo, Japan, Nov. 2013, pp. 990-995. <hal-01539413>.
- ref_biblio
- W. Hassani, S. S. Mohammed, and Y. Y. Amirat, "Real-Time EMG driven Lower Limb Actuated Orthosis for Assistance As Needed Movement Strategy," in RSS 2013, Berlin, Germany, Jun. 2013, pp. htt://roboticsroceedings.org/rss09/54.df. <hal-00919375>.
2012
- ref_biblio
- A. A. Chibani, S. S. Mohammed, and Y. Y. Amirat, "Assistive robotics and ambient intelligence for everyday life activities," in the 2012 PAL Workshop (Personnaly Assisted Living), Inria Nancy, France, 2012. <hal-01679948>.
- ref_biblio
- A. A. Chibani, Y. Y. Amirat, S. S. Mohammed, N. Hagita, and E. T. Matson, "Future research challenges and applications of ubiquitous robotics," in Proc. Of the 14th International conference on Ubiquitous Computing UbiComp'12, Pittsburgh, U. S. A, United States, Sep. 2012, pp. 883-891. <hal-01679908>.
- ref_biblio
- A. Fijany, and G. G. Fried, "Novel algorithm for computation of inverse kinematics and inverse dynamics of Gough-Stewart platform," in Proc. of the IEEE International Conference on Intelligent Robots and Systems, IROS 2012, Vilamoura, Algarve, Portugal, 2012, pp. 1573-1580. <hal-01679900>.
- ref_biblio
- A. Nakib, B. B. Daachi, and P. .. Siarry, "Hybrid differential evolution using low-discrepancy sequences for image segmentation," in Proc. Of the 26th IEEE Int. Parallel and Distributed Processing Symposium IPDPS’2012, Shanghai, China, 2012, pp. 627-633. <hal-01679221>.
- ref_biblio
- B. Hu, A. A. Chibani, and Y. Y. Amirat, "Semantic context relevance assessment in urban ubiquitous environments," in Proc. Of the 14th International conference on Ubiquitous Computing UbiComp'12, Pittsburgh, United States, 2012, pp. 639-640. <hal-01679906>.
- ref_biblio
- B. Hu, T. Patkos, A. A. Chibani, and Y. Y. Amirat, "Rule-Based Context Assessment in Smart Cities," in Proc. Of the 6th International Conference on Web Reasoning and Rule Systems, RR 2012, Vienna, Austria, 2012, pp. 221-224. <hal-01679899>.
- ref_biblio
- D. Trabelsi, S. S. Mohammed, F. Chamroukhi, L. Oukhellou, and Y. Y. Amirat, "Supervised and unsupervised classification approaches for human activity recognition using body-mounted sensors," in Proc. the 20th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, ESANN 2012, Bruges, Belgium, 2012, pp. 417-422. <hal-01679903>.
- ref_biblio
- D. Trabelsi, S. S. Mohammed, Y. Y. Amirat, and L. Oukhellou, "Activity Recognition Using Body Mounted Sensors: An Unsupervised Learning based Approach," in Proc. Of the International Joint Conference on Neural Networks, IJCNN 2012, as a part of the 2012 IEEE World Congress on Computational Intelligence, WCCI 2012, Brisbane, Australia, 2012, pp. 1-7. <hal-01679902>.
- ref_biblio
- E. A. Feukeu, K. Djouani, and A. Kurien, "Doppler Effect Analysis and Modulation Code Derivation," in 7th International Symposium on Intelligent System Techniques for Ad hoc and Wireless Sensor Networks, Ontario, Canada, Aug. 2012, pp. 1032-1038. <hal-00919747>.
- ref_biblio
- E. Prestes, A. A. Chibani, A. Saffiotti, C. Schlenoff, S. Gérard, R. Sanz, M. E. Barreto, R. Madhavan, and Y. Y. Amirat, "Towards an upper ontology and methodology for robotics and automation," in Proc. Of the 14th International conference on Ubiquitous Computing, UbiComp'12, Pittsburgh, United States, 2012, pp. 873-882. <hal-01679909>.
- ref_biblio
- F. Sebbak, A. A. Chibani, Y. Y. Amirat, A. Mokhtari, and F. Benhammadi, "An evidential fusion approach for activity recognition under uncertainty in ambient intelligence environments," in Proc. Of the 14th International conference on Ubiquitous Computing, UbiComp'12, Pittsburgh, United States, 2012, pp. 834-840. <hal-01679907>.
- ref_biblio
- H. Rifai, S. S. Mohammed, B. B. Daachi, and Y. Y. Amirat, "Adaptive Control of a Human-Driven Knee Joint Orthosis," in Proc. of the IEEE International Conference on Robotic and Automation, ICRA 2012, St. Paul, United States, 2012, pp. 2486--2491. <hal-01679898>.
- ref_biblio
- L. Bennacer, L. Ciavaglia, A. A. Chibani, Y. Y. Amirat, and A. Mellouk, "Optimization of fault diagnosis based on the combination of Bayesian Networks and case Based Reasoning," in Proc. Of the IEEE/IFIP Network Operations and Management Symposium (NOMS), Hawaii, USA, United States, Apr. 2012, pp. 619-622. <hal-01678616>.
- ref_biblio
- M. Dakkak, A. Nakib, B. B. Daachi, P. .. Siarry, and J. Lemoine, "Localisation de capteurs sans fil. Parallélisation sur GPGP," in 13ème congrès de la Société Française de Recherche Opérationnelle et d’Aide à la Décision, ROADEF’2012, Angers, France, 2012. <hal-01679269>.
- ref_biblio
- M. Dakkak, A. Nakib, B. B. Daachi, P. .. Siarry, and J. Lemoine, "Mobile indoor location based on fractional differentiation," in Proc. Of the IEEE Wireless Communications and Networking Conference, WCNC 2012, Paris, France, 2012, pp. 2003-2008. <hal-01679901>.
- ref_biblio
- N. Ayari, A. A. Chibani, and Y. Y. Amirat, "A Semantic Approach to Enhance Human-Robot Interaction in AmI Environments," in Human-Agent Interaction, Workshop at IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2012, Vilamoura, Portugal, 2012. <hal-01679905>.
- ref_biblio
- N. Javaid, A. Bibi, Z. A. Khan, U. Khan, and K. Djouani, "Evaluating Wireless Proactive Routing Protocols under Scalability and Traffic Constraints," in ICC 2012, Ottawa, Canada, Jun. 2012, pp. 774-781. <10.1109/ICC.2012.6364351>. <hal-00919783>.
- ref_biblio
- N. Javaid, A. Bibi, Z. A. Khan, U. Khan, and K. Djouani, "Evaluating Wireless Proactive Routing Protocols under Scalability and Traffic Constraints," in ICC 2012, Ottawa, Canada, Jun. 2012, pp. 774-781. <10.1109/ICC.2012.6364351>. <hal-01809515>.
- ref_biblio
- S. Mefoued, M. E. Daachi, B. B. Daachi, S. S. Mohammed, and Y. Y. Amirat, "A Robust Adaptive Neural Controller to Drive a Knee Joint Actuated Orthosis," in Proc. of the IEEE International Conference on Robotics and Biomimetics, ROBIO 2012, Guangzhou, China, 2012, pp. 1656-1661. <hal-01679897>.
- ref_biblio
- S. Mefoued, S. S. Mohammed, Y. Y. Amirat, and G. G. Fried, "Sit-To-Stand Movement Assistance Using an Actuated Knee Joint Orthosis," in Proc. Of the IEEE International Conference on Biomedical Robotics and Biomechatronics, BIOROB 2012, Roma, Italy, 2012, pp. 1753-1758. <hal-01679904>.
- ref_biblio
- S. Mefoued, S. S. Mohammed, and Y. Y. Amirat, "Commande Robuste d’un Robot Portable pour l’Assistance aux Mouvements des Membres Inférieurs d’un Sujet Humain," in 7ème Conférence Internationale Francophone d’Automatique, CIFA Grenoble, Grenoble, France, 2012, pp. 671-676. <hal-01679896>.
- ref_biblio
- S. S. Mohammed, "Functional Assisting of human lower limbs for movement restoration," in Innovative Technologies for Rehabilitation Exoskeletons, Workshop at IEEE International Conference on Biomedical Robotics and Biomechatronics, BIOROB 2012, Rome, Italy, 2012. <hal-01679950>.
- ref_biblio
- T. Patkos, A. A. Chibani, D. Plexousakis, and Y. Y. Amirat, "A Production Rule-based Framework for Causal and Epistemic Reasoning," in Proc. Of the RuleML Symposium held in conjunction with ECAI 2012, the 20th biennial European Conference on Artificial Intelligence, Montpellier, France, 2012, pp. 120-135. <hal-01679910>.
- ref_biblio
- T. Patkos, A. A. Chibani, D. Plexousakis, and Y. Y. Amirat, "A Production Rule-based Framework for Causal and Epistemic Reasoning," in the 26th Conference on Artificial Intelligence, AAAI-12, SUBAREA SPOTLIGHTS TRACK, Toronto, Canada, 2012. <hal-01679951>.
- ref_biblio
- V. Obado, K. Djouani, and Y. Hamam, "Hidden Markov Model for shortest paths testing to detect a Wormhole Attack in a localized Wireless Sensor Network," in 7th International Symposium on Intelligent System Techniques for Ad hoc and Wireless Sensor Networks, Ontario, Canada, Aug. 2012, pp. 1010-1017. <hal-00919724>.
- ref_biblio
- W. Hassani, S. S. Mohammed, and Y. Y. Amirat, "An EMG-driven Lower Limb Powered orthosis for Movement Restoration," in the 5th International Workshop on Human-Friendly Robotics, HFR2012, Bruxelles, Belgium, 2012. <hal-01679952>.
2011
- ref_biblio
- A. K. F. Prosper, Y. Hamam, and K. Djouani, "Adaptive Compensation Signal for A Wheelchair Control using Anfis Model," in ICINCO 2011, Noordwijkerhout, Netherlands, Jul. 2011, pp. tbd. <hal-00920364>.
- ref_biblio
- B. Cogrel, B. B. Daachi, Y. Y. Amirat, and A. A. Chibani, "Sélection de services basée sur l'impact en environnement ubiquitaire," in 7èmes journées francophones Mobilité et Ubiquité, Ubimob 2011, Toulouse, France, 2011. <hal-01679958>.
- ref_biblio
- B. Cogrel, B. B. Daachi, and Y. Y. Amirat, "Impact-based Contextual Service Selection in a Ubiquitous Robotic Environment," in Proc. Of the 8th International Conference on Ubiquitous Robots and Ambient Intelligence, URAI 2011, Incheon, South Korea, 2011, pp. 313-318. <hal-01679918>.
- ref_biblio
- C. Tu, B. Van Wyk, K. Djouani, Y. Hamam, and D. Shengzhi, "Line positioning based on HT error compensation," in ICSPCC 2011, Shaanxi, China, Sep. 2011, pp. 1-4. <hal-00920337>.
- ref_biblio
- D. A. Rambim, M. Mzyece, and K. Djouani, "Enhancement of TCP in 802.11e Wireless Local Area Networks," in VTC Fall 2011, San Fransisco, United States, Sep. 2011, pp. 1-5. <hal-00920343>.
- ref_biblio
- D. Trabelsi, S. S. Mohammed, F. Chamroukhi, L. Oukhellou, and Y. Y. Amirat, "Activity recognition using hidden Markov models," in New and Emerging Technologies in Assistive Robotics, Workshop at IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2011, San Fransisco, United States, 2011. <hal-01679919>.
- ref_biblio
- D. Trabelsi, S. S. Mohammed, F. Chamroukhi, L. Oukhellou, and Y. Y. Amirat, "Segmentation and classification of human activities using body-mounted inertial sensors," in Journées Nationales de la Robotique Interactive du GDR Robotique, JNRI 2011, Paris, France, 2011. <hal-01679953>.
- ref_biblio
- F. M. Awuor, K. Djouani, and G. Noel, "Distributed Joint Power and Rate Adaptation in Adhoc Networks," in WINSYS'2011, Seville, Spain, 2011, pp. tbd. <hal-00920293>.
- ref_biblio
- F. M. Awuor, K. Djouani, and G. Noel, "Joint Power and Rate Adaptation in Ad Hoc Networks based on Coupled Interference," in ANT-2011, Ontario, Canada, Sep. 2011, pp. 272-279. <hal-00920322>.
- ref_biblio
- F. P. A. Kinfack, Y. Hamam, and K. Djouani, "Adaptive Compensation Signal for A Wheelchair Control using Anfis Model," in Proc. of the 8th International Conference on Informatics in Control ,Automation and Robotics, ICINCO 2011, Noordwijkerhout, The, Netherlands, 2011. <hal-01679913>.
- ref_biblio
- G. P. Zarri, "Differentiating Between ''Functional'' and ''Semantic'' Roles in a HighLevel Conceptual Data Modeling Language," in Proc. Of the 24th International Florida Artificial Intelligence Research Society Conference, FLAIRS 2011, Palm Beach, United States, May. 2011, pp. 75-80. <hal-01679916>.
- ref_biblio
- H. H. Rifai, W. Hassani, S. S. Mohammed, and Y. Y. Amirat, "Bounded Control of an Actuated Lower Limb Orthosis," in Proc. of the 50th IEEE International Conference on Decision and Control (CDC 2011) and European Control Conference (ECC 2011), Orlando, United States, 2011, pp. 873-878. <hal-01679920>.
- ref_biblio
- H. Rifai, S. S. Mohammed, and A. Mellouk, "A brief synthesis of QoS-QoE methodologies," in Proc. Of IEEE International Symposium on Programming and Systems (ISPS), Algiers, Algeria, 2011, pp. 32-38. <hal-01678633>.
- ref_biblio
- L. L. Sabri, A. A. Chibani, Y. Y. Amirat, and G. P. Zarri, "Semantic and architectural approach for Spatio-Temporal Reasoning in Ambient Assisted Living," in 22th International Joint Conference on Artificial Intelligence, IJCAI 2011, Barcelona, Spain, 2011, pp. 77-84. <hal-01679917>.
- ref_biblio
- L. Sabri, A. A. Chibani, T. Patkos, F. Sebbak, and Y. Y. Amirat, "Advanced Context modeling and Reasoning for ambient intelligence environments and ubiquitous robotics," in Journées Nationales de la Robotique Interactive du GDR Robotique, JNRI 2011, Paris, France, 2011. <hal-01679955>.
- ref_biblio
- L. Sabri, A. A. Chibani, Y. Y. Amirat, and G. P. Zarri, "Narrative reasoning for cognitive ubiquitous robots," in Knowledge Representation for Autonomous Robots, Workshop at IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2011, San Fransisco, United States, 2011. <hal-01679911>.
- ref_biblio
- L. Sabri, A. A. Chibani, Y. Y. Amirat, and G. P. Zarri, "Semantic-based situation recognition for ubiquitous robots and ambient intelligence environments," in Journées Nationales de la Robotique Interactive du GDR Robotique, JNRI 2011, Paris, France, 2011. <hal-01679959>.
- ref_biblio
- M. Dakkak, A. Nakib, B. B. Daachi, P. .. Siarry, and J. J. Lemoine, "Méthode hybride de localisation à l’intérieur d’un bâtiment via la classification de coordonnées," in 12ème congrès de la Société Française de Recherche Opérationnelle et d’Aide à la Décision ROADEF’2011, Saint-Etienne, France, 2011, pp. 411-412. <hal-01679274>.
- ref_biblio
- M. Hilia, A. A. Chibani, Y. Y. Amirat, and K. Djouani, "Cross-Organizational Cooperation Framework for Security Management in Ubiquitous Computing Environment," in Proc. of the 23rd IEEE International Conference on Tools with Artificial Intelligence, ICTAI 2011, Boca Raton, United States, 2011, pp. 464-471. <hal-01679912>.
- ref_biblio
- N. Boumella, K. Djouani, and M. Boulemden, "On an interval type-2 TSK FLS A1-C1 consequent parameters tuning," in Proc. Of the IEEE Symposium on Advances in Type-2 Fuzzy Logic Systems, 2FUZZ 2011, Paris, France, 2011, pp. 150-156. <hal-01679915>.
- ref_biblio
- N. Javaid, M. Ullah, and K. Djouani, "Identifying Design Requirements for Wireless Routing Link Metrics," in GLOBECOM'2011, Houston, United States, Dec. 2011, pp. 1-5. <hal-00920315>.
- ref_biblio
- N. Javaid, M. Yousaf, A. Ahmad, A. Naveed, and K. Djouani, "Evaluating impact of mobility on wireless routing protocols," in ISWTA 2011, Langkawi, Malaysia, Sep. 2011, pp. 84-89. <hal-00920352>.
- ref_biblio
- N. Sghaier, A. Mellouk, B. Augustin, Y. Y. Amirat, J. Marty, M.-E.-A. Khoussa, A. Abid, and R. Zitouni, "Wireless Sensor Networks for medical care services," in Proc. Of the IEEE International Wireless Communications and Mobile Computing Conference (IWCMC), Istanbul, Turkey, Jul. 2011, pp. 571-576. <10.1109/IWCMC.2011.5982596>. <hal-01678639>.
- ref_biblio
- O. Niang, M. O. Guerra, A. A. Thioune, E. Deléchelle, T. Niane Mary, and J. Lemoine, "A propos de l'orthogonalité dans la Décomposition Modale Empirique," in XIII Colloque GRETSI, Bordeaux, France, Sep. 2011, pp. ID257. <hal-00711984>.
- ref_biblio
- S. Mefoued, S. S. Mohammed, and Y. Y. Amirat, "Knee joint movement assistance through robust control of an actuated orthosis," in Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2011, San Fransisco, United States, 2011, pp. 1749-1754. <hal-01679921>.
- ref_biblio
- S. O. Onyango, Y. Hamam, and K. Djouani, "Velocity and Orientation Control in an Electrical Wheelchair on an inclined and slippery surface," in Proc. of the 8th International Conference on Informatics in Control, Automation and Robotics, ICINCO 2011, Noordwijkerhout, The, Netherlands, 2011, pp. 112-119. <hal-01679914>.
- ref_biblio
- S. S. Mohammed, Y. Y. Amirat, and W. Hassani, "An active knee joint orthosis to assist human lower limbs movements," in the 1st International Congress in Scientific Testing of Orthotic Devices, Aix-les-Bains, France, 2011. <hal-01679956>.
- ref_biblio
- W. Hassani, S. S. Mohammed, and Y. Y. Amirat, "An Actuated Orthosis to Assist Knee Joint Movements," in Journée Assistance aux mouvements et rééducation, Journée GDR-Robotique GT1 (Robotique Médicale), Paris, France, 2011. <hal-01679954>.
- ref_biblio
- W. Hassani, S. S. Mohammed, and Y. Y. Amirat, "Cognitive interaction between lower limb and knee joint actuated orthosis," in Journées Nationales de la Robotique Interactive du GDR Robotique, JNRI 2011, Paris, France, 2011. <hal-01679957>.
2010
- ref_biblio
- A. Mellouk, A. A. Chibani, and S. Souihi, "Vers une gestion intelligente, autonome et multi-couches des réseaux et systèmes ubiquitaires à large échelle," in 24 ème congrès DNAC- De Nouvelles Architectures pour les Communications conference, Paris, France, 2010. <hal-01678726>.
- ref_biblio
- A. Mellouk, A. Chibani, and S. Souihi, "Vers une gestion intelligente, autonome et multi-couches des réseaux et systèmes ubiquitaires à large échelle," in 24 ème congrès DNAC- De Nouvelles Architectures pour les Communications Conference, Paris, France, Nov. 2010. <hal-01535688>.
- ref_biblio
- F. Gharsalli, A. A. Chibani, and Y. Y. Amirat, "Approche de contrôle d’accès collaboratif entre plusieurs domaines de sécurité dans un environnement ubiquitaire," in 6èmes Journées Francophones Mobilité et Ubiquité, Ubimob 2010, Lyon, France, 2010. <hal-01679961>.
- ref_biblio
- F. Sebbak, A. Mokhtari, A. Chibani, and Y. Amirat, "Context-aware ubiquitous framework services using JADE-OSGI integration framework," in 2010 International Conference on Machine and Web Intelligence (ICMWI), Algiers, Algeria, Oct. 2010, pp. 48-53. <10.1109/icmwi.2010.5647900>. <hal-05348725>.
- ref_biblio
- G. P. Zarri, "Representing and Managing Narratives in a Computer-Suitable Form," in Computational Models of Narratives -- Papers from the AAAI 2010 Fall Symposium (Technical Report FS-10-04), Arlington, United States, Nov. 2010, pp. 73-80. <hal-01679924>.
- ref_biblio
- H. Emam, Y. Hamam, E. Monacelli, and K. Djouani, "Power wheelchair driver behaviour modeling," in Proc. Of the 7th IEEE International Multi-Conference on Systems Signals and Devices, SSD 2010, Amman, Jordan, 2010, pp. 1-7. <hal-01679922>.
- ref_biblio
- K. Tari, Y. Y. Amirat, A. A. Chibani, A. Yachir, and A. Mellouk, "Context-aware Dynamic Service Composition in Ubiquitous Environment," in Proc. Of the IEEE International Conference on Communications (ICC), Cape Town, South Africa, 2010, pp. 1-5. <hal-01678643>.
- ref_biblio
- S. Iqbal, S. S. Mohammed, and Y. Y. Amirat, "Uncertainty Analysis in Continuum Robot Kinematics," in Snakes, Worms and Catheters: Continuum and Serpentine Robots for Minimally Invasive Surgery, Workshop at IEEE International Conference on Robotic and Automation, ICRA 2010, Anchorage, United States, 2010, pp. 30-32. <hal-01679925>.
- ref_biblio
- T. Luhandjula, K. Djouani, Y. Hamam, B. J. V. Wyk, and Q. Williams, "A hand-based visual intent recognition algorithm for wheelchair motion," in Proc. Of the 3rd Conference on Human System Interactions, Rzeszow, Poland, 2010, pp. 749-756. <hal-01679926>.
- ref_biblio
- T. O. Olwal, B. J. V. Wyk, K. Djouani, Y. Hamam, P. .. Siarry, and N. Ntlatlapa, "Decentralized power control for multi-radio multi-channel wireless mesh networks," in Proc. of the Southern Africa Telecommunication Networks and Applications Conference, SATNAC’2010, Spier Estate, South Africa, 2010, pp. 213-218. <hal-01679923>.
- ref_biblio
- Y. Y. Amirat, and S. S. Mohammed, "Robots en réseau. Principes, verrous et perspectives," in 3ème Journée du GT ARC (Automatique et Réseaux de Communication)- GDR MACS, Paris, France, 2010. <hal-01679962>.
2009
- ref_biblio
- A. Yachir, K. Tari, A. A. Chibani, and Y. Y. Amirat, "Robotique Ubiquitaire Sensible au Contexte. Objectifs et défis," in Journée GDR-Robotique, GT5 (Interactions Personnes/Systèmes robotiques), Paris, France, 2009. <hal-01679964>.
- ref_biblio
- A. Yachir, Y. Y. Amirat, A. A. Chibani, and K. Tari, "Approche basée sur la qualité de service pour la composition automatique des services en robotique ubiquitaire," in 7èmes Journées Nationales de la Recherche en Robotique, JNRR'09, Neuvy-sur-Barangeon, France, 2009. <hal-01679963>.
- ref_biblio
- A. Yachir, Y. Y. Amirat, K. Tari, and A. A. Chibani, "QoS Based Framework for Ubiquitous Robotic Services Composition," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, St. Louis, United States, 2009, pp. 2019 --2026. <hal-01679930>.
- ref_biblio
- B. Achili, B. B. Daachi, A. Ali-Chérif, and Y. Y. Amirat, "A Robust neural adaptive force controller for a C5 parallel robot," in Proc. of the International Conference on Advanced Robotics, ICAR 2009, Munich, Germany, 2009, pp. 1-6. <hal-01679931>.
- ref_biblio
- B. Achili, B. B. Daachi, A. Ali-Chérif, and Y. Y. Amirat, "Combined MLP Neural Network and Sliding Mode Technique for Parallel Robots Control: An Adaptive Approach," in Proc. Of the IEEE Int. Joint Conf. on Neural Networks, IJCNN 2009, Atlanta, United States, 2009, pp. 28--35. <hal-01679929>.
- ref_biblio
- N. Boumella, K. Djouani, and S. Iqbal, "A new design of Fuzzy Logic Controller based on generalized orthogonality principle," in Proc. Of the 2009 IEEE International Symposium on Computational Intelligence in Robotics and Automation, CIRA 2009, Daejeon, South Korea, 2009, pp. 497-502. <hal-01679928>.
- ref_biblio
- S. Iqbal, S. S. Mohammed, and Y. Y. Amirat, "A Guaranteed Approach For Kinematic Analysis of Continuum Robot Based Catheter," in Proc. Of the 2009 IEEE International Conference on Robotics and Biomimetics, ROBIO 2009, Guilin, China, 2009, pp. 1573-1578. <hal-01679932>.
- ref_biblio
- S. O. Onyango, Y. Hamam, M. Dabo, K. Djouani, and G. Qi, "Dynamic control of powered wheelchair with slip on an incline," in Proc. Of the 2nd International Conference on Adaptive Science & Technology, ICAST 2009, Accra, Ghana, 2009, pp. 278-283. <hal-01679927>.
- ref_biblio
- S. S. Mohammed, Y. Y. Amirat, and S. Mefoued, "EICOSI (Exosquelette Intelligent COmmunicant Sensible à l’Intention)," in 7èmes Journées Nationales de la Recherche en Robotique, JNRR'09, Neuvy-sur-Barangeon, France, 2009. <hal-01679965>.
- ref_biblio
- T. O. Olwal, B. J. V. Wyk, K. Djouani, Y. Hamam, P. .. Siarry, and N. Ntlatlapa, "Autonomous transmission power adaptation for multi-radio multi-channel wireless mesh networks," in Proc. of the 8th International Conference on Ad-Hoc, Mobile and Wireless Networks, ADHOC-NOW 2009, Messina, Italy, Sep. 2009, pp. 284-297. <hal-01679553>.
- ref_biblio
- T.-O. Olwal, B. J. V. Wyk, K. Djouani, Y. Hamam, P. .. Siarry, and N. Ntlatlapa, "Interference-aware power control for multi-radio multi-channel wireless mesh networks," in Proc. Of the 9th IEEE Conference in Africa, AFRICON’2009, Nairobi, Kenya, 2009, pp. 1-6. <hal-01679251>.
- ref_biblio
- T.-O. Olwal, B. J. V. Wyk, K. Djouani, Y. Hamam, P. .. Siarry, and N. Ntlatlapa, "Range based power control for multi-radio multi-channel wireless mesh networks," in Proc. of the Southern Africa Telecommunication Networks and Applications Conference, SATNAC’2009, Lobamba H100, Swaziland, 2009, pp. 49-54. <hal-01679248>.
2008
- ref_biblio
- A. B. A. Mokhtari, Y. Orlov, and B. B. Daachi, "Non Linear H1 Control of Quadrotor Unmanned Aerial Vehicule," in Proc. of the 3rd International Conference on Applied Mechanics and Mechanical Engineering, Cairo, Egypt, 2008. <hal-01679934>.
- ref_biblio
- A. Yachir, K. Tari, A. A. Chibani, and Y. Y. Amirat, "Toward an Automatic Approach for Ubiquitous Robotic Services Composition," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2008, Nice, France, 2008, pp. 3717-3724. <hal-01679935>.
- ref_biblio
- B. Achili, B. B. Daachi, A. Ali-Cherif, and Y. Y. Amirat, "Compensateur neuronal adaptatif pour la commande d’un robot parallèle à liaisons C5," in Conférence Internationale Francophone d’Automatique, CIFA 2008, Bucarest, Romania, 2008. <hal-01679937>.
- ref_biblio
- B. Achili, B. B. Daachi, A. Ali-Cherif, and Y. Y. Amirat, "Robust control of the C5 parallel robot," in Proc. of Int. Conf. on Informatics in Control, Automation and Robotics, ICINCO 2008, Funchal, Madeira, Portugal, 2008, pp. 183-186. <hal-01679940>.
- ref_biblio
- B. Achili, B. B. Daachi, Y. Y. Amirat, and A. Ali-Cherif, "Identification of the Dynamic Parameters of the C5 Parallel Robot," in Proc. of Int. Conf. on Informatics in Control, Automation and Robotics, ICINCO 2008, Funchal, Madeira, Portugal, 2008, pp. 67-70. <hal-01679939>.
- ref_biblio
- E. Al-Ahmar, E. Benbouzid, Y. Amirat, and E. Elghali, "DFIG-based wind turbine fault diagnosis using a specific discrete wavelet transform," in 2008 International Conference on Electrical Machines (ICEM), Vilamoura, France, Sep. 2008, pp. 1-6. <hal-02041509>.
- ref_biblio
- L. Fryziel, G. G. Fried, K. Djouani, S. Iqbal, and Y. Y. Amirat, "A kinematic analysis for a hybrid continuum active catheter," in Proc. Of MECATRONICS 2008 -- 7th France-Japan congress -- 5th Europe-Asia congress, Le Grand Bornand, France, 2008. <hal-01679933>.
- ref_biblio
- M. E. Daachi, B. Achili, B. B. Daachi, and D. Chikouche, "Neural Network Identification For a C5 Parallel Robot," in Proc. of the 1st Mediterranean Conference on Intelligent Systems and Automation, CISA 08, Annaba, Algeria, 2008, pp. 228-233. <hal-01679936>.
- ref_biblio
- S. Randrianarisolo, E. Delechelle, E. Petit, A. Rahmouni, and J. Garot, "Assessment of myocardial deformations from untagged cardiac cine MRI," in Proc. Of the 30th Annual International of the IEEE Engineering in Medecine and Biology Society, EMBS 2008, Vancouver, British Columbia, Canada, 2008, pp. 3401-3404. <hal-01679253>.
- ref_biblio
- S. S. Mohammed, and Y. Y. Amirat, "Towards Intelligent Lower Limb Wearable Robots: Challenges and Perspectives - State of the Art," in Proc. of the IEEE International Conference on Robotics and Biomimetics, ROBIO’08, Bangkok, Thailand, 2008, pp. 312-317. <hal-01679938>.
Proceedings, Poster, Special issue : 4
2023
- ref_biblio
- S. Balakirsky, C. Schlenoff, S. Redfield, P. Martin, P. Gonçalves, F. Maikore, A. Downs, B. Fogelson, M. Habib, T. Haidegger, D. Ireland, S. Kortik, J. Mosley, H. Nakawala, J. Baras, M. Barreto, J. Bermejo-Alonso, S. Borgo, A. Bouchard, J. Carbonera, A. Chibani, N.-Y. Chong, V. Edwards, A. Gasteratos, T. Jeyaselvan, V. Jorge, Z. Kootbally, J. Liu, E. L. J. Malek, J. Mathana, E. Prestes, V. Ragavan, R. Sanz, P. S. D. Scheidt, G. Sethia, M. Seto, and Y. Zhao, "IEEE Draft Standard for Robot Task Representation," unpublished, Oct. 2023, pp. 1-35. <hal-04345713>.
2022
- ref_biblio
- H. Li, P. Goncalves, V. Ragavan, A. Olivares-Alarcos, E. M. Barreto, D. Be$\beta$ler, J. Bermejo, S. Borgo, A. Chibani, J. Carbonera, M. Diab, S. Fiorini, A. Gyrard, M. Habib, A. Khamis, K. Moulouel, H. Nakawala, B. Nguyen, C. Nowak, J. Olszewska, E. Pignaton, E. Prestes, J. Quintas, S. Redfield, R. Sanz, C. Schlenoff, and E. Tosello, "IEEE Standard for Autonomous Robotics (AuR) Ontology," unpublished, May. 2022, pp. 1-49. <hal-04333697>.
2021
- ref_biblio
- E. Prestes, R. Fiorini, M. Houghtaling, B. Ramlal, P. Gonçalves, B. Blobel, D. Brutzman, J. Carbonera, A. Chibani, P. Courtney, N. Fabiano, T. Haidegger, V. Hailey, D. Holstein, T. Kurihara, Z. Murahwi, J. Olszewska, B. Page, W. Patterson, V. Ragavan, R. Rannow, M. Saerbeck, A. De Oliveira Schenini Moreira, O. Ulgen, and A. Valani, "IEEE Ontological Standard for Ethically Driven Robotics and Automation Systems," unpublished, Nov. 2021, pp. 1-119. <hal-04333675>.
2015
- ref_biblio
- C. Schlenoff, E. Prestes, P.-J. S. Gonçalves, M. Abel, Y. Y. Amirat, S. Balakirsky, M.-E. Barreto, J.-L. Carbonera, A. A. Chibani, S. R. Fiorini, S. Gérard, V.-A.-M. Jorge, M. Habib, T. Haidegger, S. Kumar, H. Li, A. Locoro, R. Madhavan, V. Ragavan, S. Redfield, and V. F. Rey, "IEEE Standard Ontologies for Robotics and Automation," unpublished, 2015. <hal-01542515>.
Brevets : 4
2022
- ref_biblio
- J.-M. Gracies, and S. Mohammed, "An analysis system with a portable connected device" France Patent EP4014840A1 , Jun. 2022 <hal-04333102>.
2021
- ref_biblio
- S. Mohammed, Y. Amirat, and J.-M. Gracies, "Stimulation device for activating at least one muscle involved in raising the foot" France Patent US11007366B2 , May. 2021 <hal-04333105>.
2018
- ref_biblio
- F. Attal, Y. Amirat, and S. Mohammed, "Procédé de caractérisation d'un cycle de marche d'un sujet au moyen d'un modèle de Markov caché" France Patent FR3060147 , Jun. 2018 <hal-01683233>.
- ref_biblio
- S. Mohammed, Y. Amirat, and J. M. Gracies, "Dispositif de stimulation pour l'activation d'au moins un muscle intervenant dans le relevé du pied" France Patent FR3056114 , Mar. 2018 <hal-01683234>.
/!\ Directions d'ouvrages, Proceedings : 1
2024
- ref_biblio
- A. Z. Messaoui, L. Peyrodie, M. A. Alouane, F. Gionco, and M. Guiatni, Deep Learning-Based Efficient Human Joint Movement Prediction using Surface Electromyography Data, Paris, France, IEEE, Jun. 2024, pp. 1-6. <10.1109/ICCAD60883.2024.10553805>. <hal-05028704>.
Pré-publication, Document de travail : 1
2025
- ref_biblio
- G. Khodabandelou, Y. Amirat, A. Chibani, and H. Kikuchi, "Federated and Locally Differentially Private Riemannian Masked Autoencoders for Multimodal Emotion and Activity Recognition," unpublished, Aug. 2025. <hal-05205058>.