

Assistance-as-Needed based approach to assist movements of knee joint flexion-extension movements
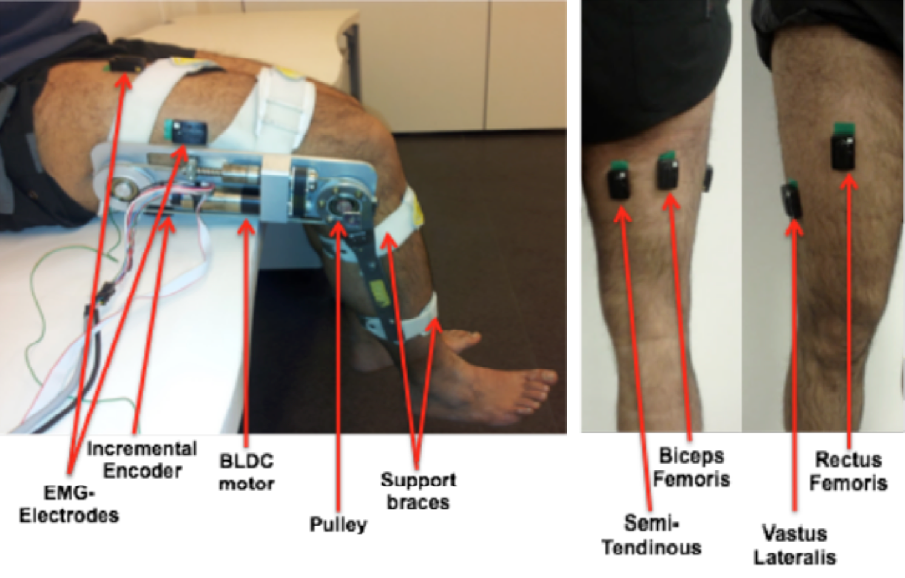
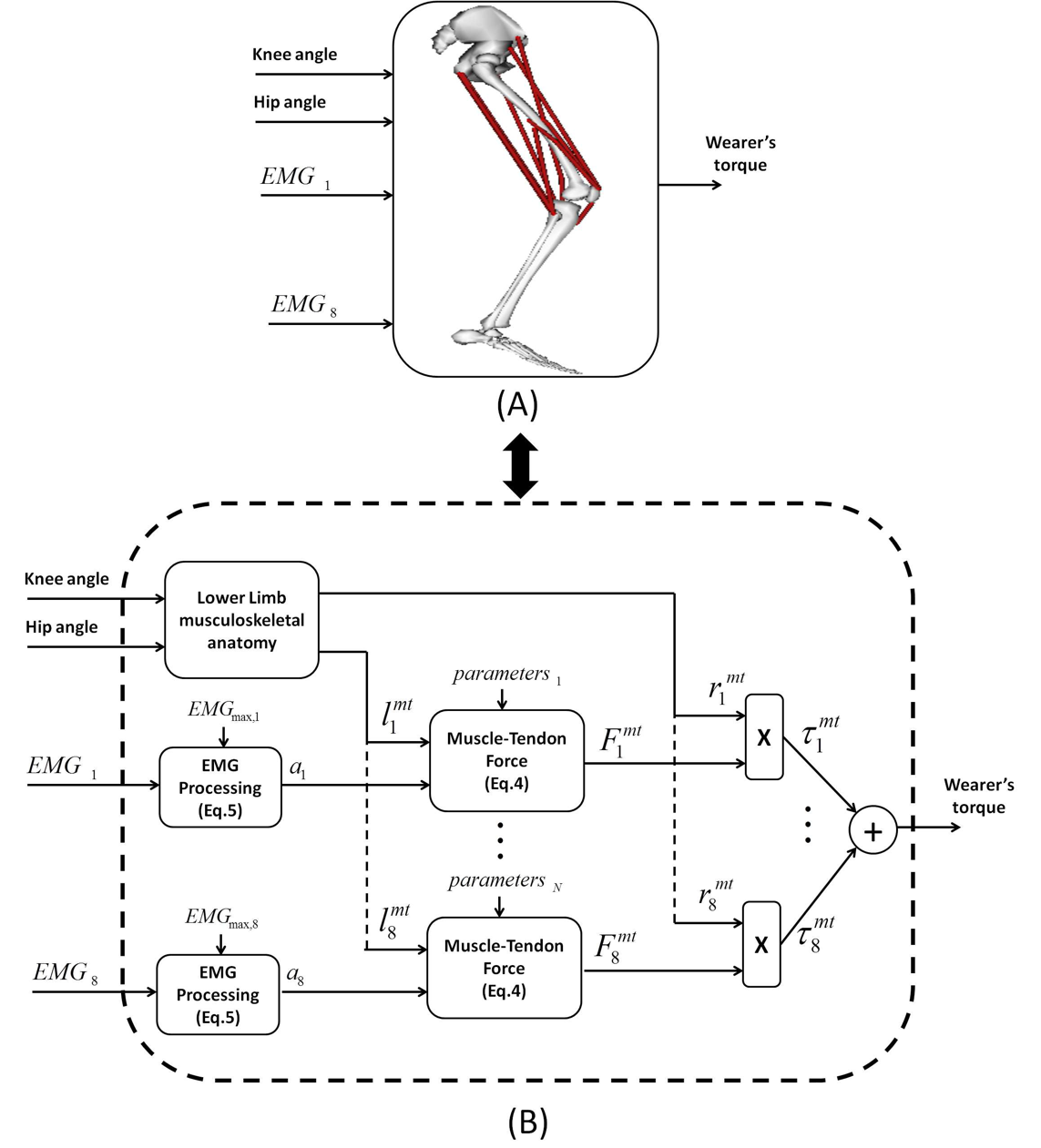
This demonstrator shows a new approach to control a wearable knee joint exoskeleton driven through the wearer’s intention. A realistic bio-inspired musculoskeletal knee joint model is used to control the exoskeleton. This model considers changes in muscle length and joint moment arms as well as the dynamics of muscle activation and muscle contraction during lower limb movements. Identification of the model parameters is done through an unconstrained optimization problem formulation. A control law strategy based on the principle of assistance as needed is proposed. This approach guarantees asymptotic stability of the knee joint orthosis and adaptation to human-orthosis interaction. Moreover, the proposed control law is robust with respect to external disturbances. As shown in the below video, experimental validations are conducted online with healthy subject during flexion and extension of their knee joint. The proposed control strategy has shown satisfactory performances in terms of tracking trajectory and adaptation to human tasks completion.
References:
[1] W. Hassani, S. Mohammed, H. Rifai, Y. Amirat, "Powered orthosis for lower limb movements assistance and rehabilitation", Control Engineering Practice, Elsevier, vol. 26, no. 5, pp. 245- 253, 2014.
[2] W. Hassani, S. Mohammed, Y. Amirat, "Real-Time EMG driven Lower Limb Actuated Orthosis for Assistance As Needed Movement Strategy," in the 2013 Robotics: Science and Systems conference, RSS 2013, Berlin, Germany, Jun. 2013, pp.
http://roboticsproceedings.org/rss09/p54.pdf