

Assistance of Daily Living Activities using a Lower Limb Exoskeleton
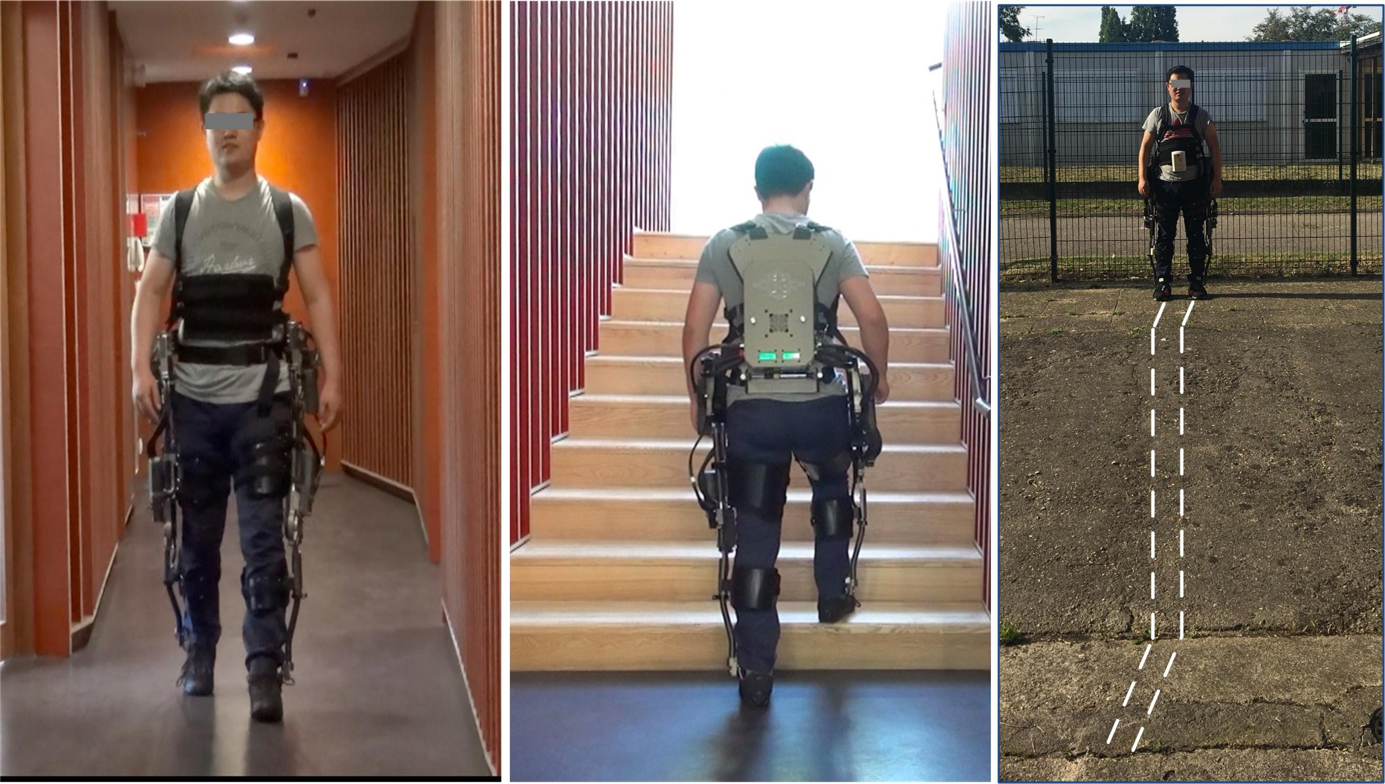
Gait modes, such as level walking, stair ascent/descent and ramp ascent/descent, show different lower-limb kinematic and kinetic characteristics. Therefore, an accurate detection of these modes is critical for a wearable robot to provide appropriate power assistance. In this demostrator, a fast gait mode detection method based on a body sensor system is shown. A fuzzy logic algorithm is used to estimate the likelihoods of gait modes in real-time. Since the proposed fast gait mode detection makes it possible to select appropriate kinematic and kinetic models for each gait mode, assistive torques required for assisting the human motions can be obtained more naturally and immediately. The proposed methods are all verified by experiments with a lower-limb exoskeletal assistive robot with transparent actuation by series elastic actuators, called the Exoskeletal Robotic Orthosis for Walking Assistance (EROWA). Four healthy subjects participated in the experiments. All subjects were asked to perform different gait modes using their normal and simulated abnormal gaits, i.e., blocking the knee joint of one leg during walking. Latency and success rate of gait mode detection are selected as performance criteria. The effectiveness of the proposed gait mode based assistive strategy is evaluated using EMG muscular activities. The below video shows in details the demonstrator.
References:
[1] W. Huo, S. Mohammed, Y. Amirat, K. Kong, "Fast Gait Mode Detection and Assistive Torque Control of an Exoskeletal Robotic Orthosis for Walking Assistance (E-ROWA)", IEEE Transactions on Robotics, DOI
<10.1109/TRO.2018. 2830367>, pp. 1-18, 2018.
[2] W. Huo, S. Mohammed, Y. Amirat, K. Kong, "Active Impedance Control of a Lower Limb Exoskeleton to Assist Sit-to-Stand Movement," in Proc. Of the IEEE International Conference on Robotics and Automation, ICRA 2016, Stockholm, Sweden, 2016, pp. 3530-3536.