

E-ROWA (Exoskeletal-Robotic Orthotics for Walking Assistance)
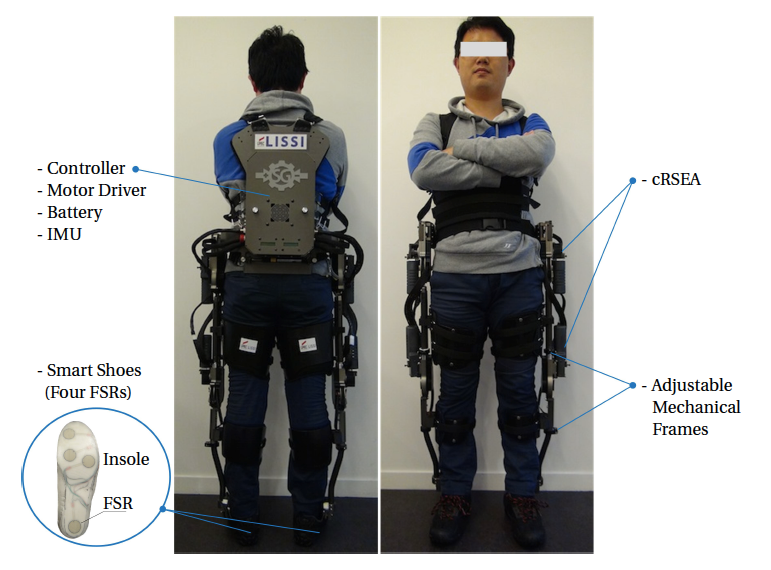
E-ROWA, shown in the figure below, developed by SG Mechatronics Co., is designed to assist dependent people to regain locomotion functions. This exoskeleton consists of four major parts: exoskeletal frames, sensors, hardware controller, and a power unit. The exoskeletal frames consist of ten degrees of freedom (DOFs) and are attached to the wearer’s waist and legs by means of straps. For each limb, there are three DOFs at each of the hip joints (i.e., flexion/extension, adduction/abduction and rotation), one DOF at each of the knee joints, and three DOFs at each of the ankle joints. The exoskeleton hip and knee joints of each limb are actuated in the sagittal plane using two compact Rotary Series Elastic Actuators (cRSEA), respectively, while the remaining DOFs are passive. The maximum output torque of each cRSEA is about 25 Nm, and the maximum rotary speed of the knee joint is 3.2 rad/s . The hip, knee, and ankle joints are also equipped each with 13 bits absolute encoders. E-ROWA is also equipped with Smart Shoes where the GRFs are measured using four force-sensing resister (FSR) sensors that are embedded at four locations of the insole. An NI myRIO board is used for data acquisition and control of the cRSEA actuators.
References:
[1] W. Huo, S. Mohammed, Y. Amirat, K. Kong, "Fast Gait Mode Detection and Assistive Torque Control of an Exoskeletal Robotic Orthosis for Walking Assistance (E-ROWA)", IEEE Transactions on Robotics, DOI <10.1109/TRO.2018. 2830367>, pp. 1-18, 2018.
[2] W. Huo, S. Mohammed, Y. Amirat, K. Kong, "Active Impedance Control of a Lower Limb Exoskeleton to Assist Sit-to-Stand Movement," in Proc. Of the IEEE International Conference on Robotics and Automation, ICRA 2016, Stockholm, Sweden, 2016, pp. 3530-3536.