Upper Limb Exoskeleton of LISSI (ULEL)
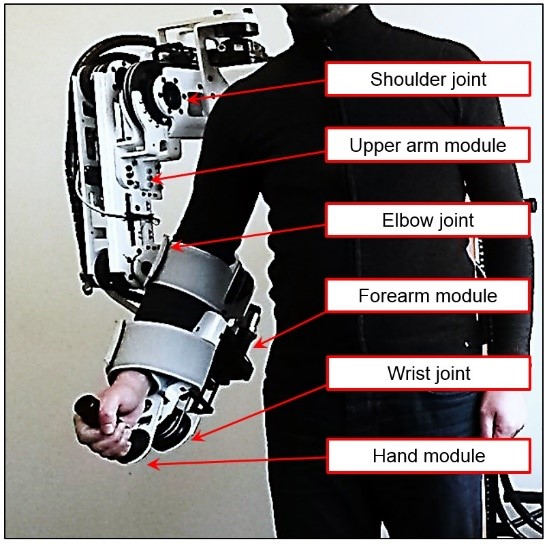
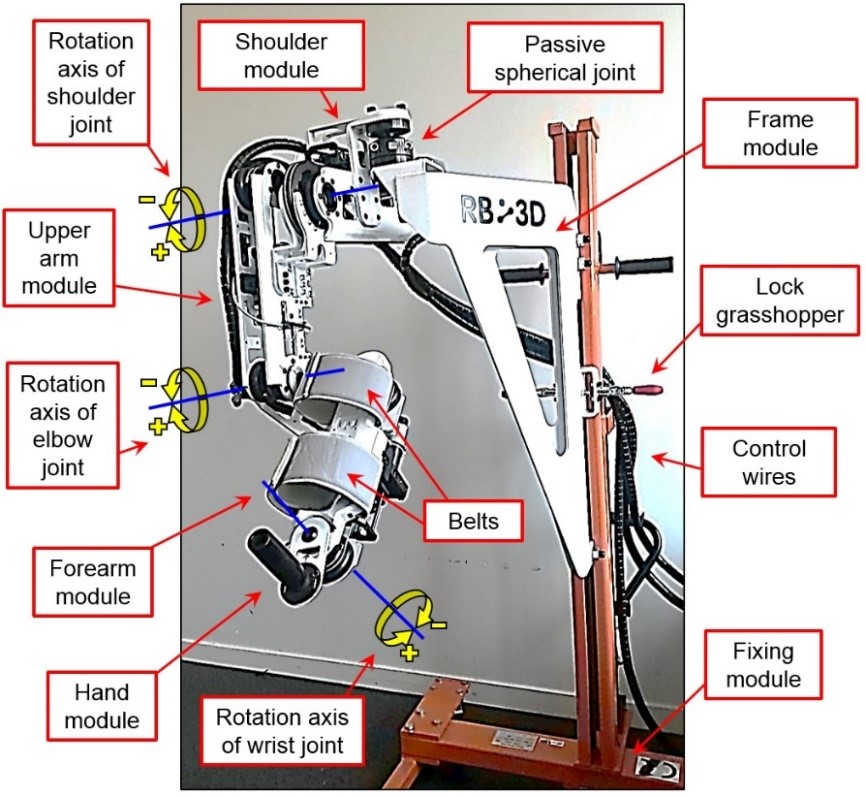
ULEL is a unique exoskeleton prototype developed by RB3D company especially for the LISSI laboratory. This exoskeleton is designed to perform scientific research on the rehabilitation of the human right arm (see Figure 1.1). It is constituted by the following six modules: The first one (Fixing module) can lift the exoskeleton at the desired level using a hydraulic system. The second module (Frame module) is connected to the first one by a vertical prismatic joint. The third module (Shoulder module) is connected to the previous module by a passive spherical joint. The last connection is used for the 3-D orientation of the exoskeleton. The fourth module (Upper arm module) is connected to the shoulder module by an active rotational shoulder joint. The fifth module (Forearm module) is articulated to the previous module by an active rotation elbow joint. The sixth and the last module (Hand module) is joined with its preceding module by an active rotational wrist joint. Figure 1.2 shows a view of ULEL in which a set of information is about its structure and the positive direction of the activated joints.
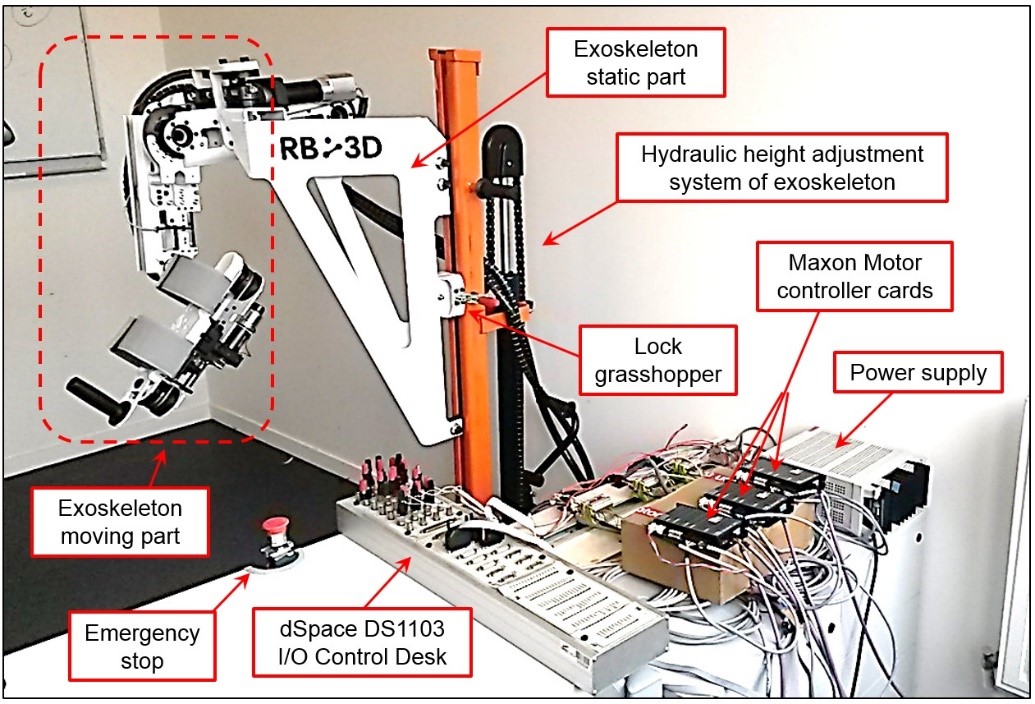
The articulations of shoulder, elbow, and wrist are actuated by powerful DC motors. A power supply and an adequate electrical control system are used to provide regulation for motor currents. An ingenious screw and cable mechanical system is used to apply torques at human joints. The generated torques permit realizing flexion/extension movements of the activated joints. The joint positions are measured by incremental encoders with satisfactory measurement accuracy. The controller is programmed on a PC equipped with a dSpace DS1103 PPC real-time controller card, using Matlab/Simulink and dSpace Control Desk software. For security reasons, the joints are constrained by safety ranges of motion and the electric motor currents are limited. An emergency stop system can be easily activated in the case of an alert. Figure 1.3 shows the experimental setup of ULEL.