

EICOSI (Exoskeleton Intelligently COmmunicating and Sensitive to Intention)
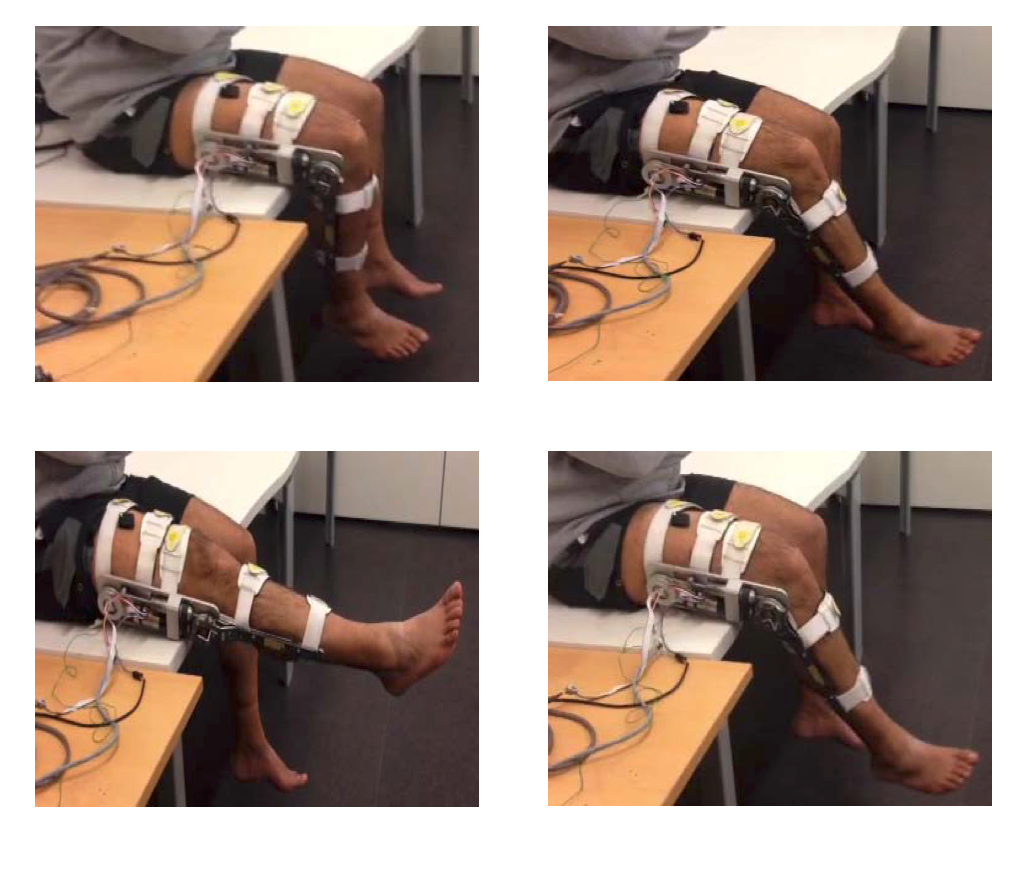
EICOSI is a single degree-of-freedom (DoF) exoskeleton prototype designed to provide power assistance at the wearer’s knee joint level (Figure below). The exoskeleton consists of two segments attached separately to the thigh and shank and fixed to the wearer’s lower limb using appropriate braces. It is driven by a high-power brushless DC motor (Maxon, Switzerland). To obtain a compact and portable structure as well as relatively high output torque, a compact transmission system is designed using a gear motor, a ball screw, a belt transmission and a cable drive. The reduction ratio from the motor side to the joint side is 264:1. The whole actuator can deliver up to approximately 18 Nm. The motor is equipped with an incremental encoder that measures the motor’s rotation angle with a resolution of 1000 pulses per revolution. The knee joint angle can be calculated based on the reduction ratio of the whole transmission system. The angular velocity is obtained by a simple derivation of the joint angle. The EICOSI is controlled using a host PC equipped with a controller board (dSPACE, Germany) running at 1 kHz. The control programs are developed using MATLAB (Mathworks, USA).
References:
[1] W. Huo, S. Mohammed, Y. Amirat, "Impedance Reduction Control of a Knee Joint Human Exoskeleton System”, IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2018.2865768, 2018.
[2] H. Rifai, S. Mohammed, K. Djouani, Y. Amirat, "Towards Lower Limbs Functional Rehabilitation through a Knee Joint Exoskeleton", IEEE Transactions on Control Systems Technology, vol. 25, no. 2, pp. 712-719, 2017.
[3] H. Rifai, M.-S. B. Abdessalem, A. Chemori, S. Mohammed, Y. Amirat, "Augmented L1 Adaptive Control of an Actuated Knee Joint Exoskeleton: From Design to Real-Time Experiments," in Proc. Of the IEEE International Conference on Robotics and Automation, ICRA 2016, Stockholm, Sweden, pp. 5708-5714, 2016.