Titre : Dynamiser la recherche avec l'Open Research Knowledge Graph (ORKG) Date et heure : 18 décembre 2024, à 17h
Conférencière : Dr. Sanju Tiwari
Introduction :
L'Open Research Knowledge Graph (ORKG) est une initiative révolutionnaire qui vise à transformer la manière dont les connaissances scientifiques sont structurées, partagées et exploitées. En utilisant des approches sémantiques avancées, l'ORKG offre un environnement collaboratif pour organiser les résultats de la recherche sous forme de graphes de connaissances interconnectés. Cette approche permet non seulement de rendre les recherches plus accessibles et interopérables, mais aussi de faciliter des découvertes interdisciplinaires.
Cet exposé mettra en lumière le potentiel de l'ORKG dans l'accélération de la recherche scientifique et le développement de collaborations à travers le monde.
Profil de la conférencière :
Dr. Sanju Tiwari, PDG et fondatrice de ShodhGuru Research Labs (Inde), est professeure à l'Université de Sharda (Inde) et chercheuse senior au TIB Hannover (Allemagne). Lauréate de la bourse DAAD Post-Doc-Net AI en 2021, elle a collaboré avec plusieurs universités allemandes. Elle a également été chercheuse postdoctorale au sein du groupe Ontology Engineering de l'Université Polytechnique de Madrid, en Espagne, en 2019.
Actuellement présidente du User Board de l'ORKG au TIB Hannover, Dr. Tiwari a coécrit le premier livre sur l'ORKG avec le Prof. Sören Auer et son équipe. Elle a dirigé l'organisation de nombreux ateliers et conférences dans le cadre d'événements internationaux prestigieux tels que ESWC, SEMANTiCS, KGSWC et WWW etc...
Mentore pour le Google Summer of Code (GSoC) chez DBpedia (2022-2024), elle est également membre de l'InfAI à l'Université de Leipzig (Allemagne) et a initié le projet "Chapitre DBpedia en hindi". Dr. Tiwari a mené des activités de recherche dans sept pays, enrichissant ses contributions au domaine de l'informatique sémantique et de la représentation des connaissances.
Huiseok MOON, doctorant de l’équipe SIRIUS soutiendra sa thèse le 19/01/2024 en Amphi RT, campus de Vitry-sur-Seine de l’UPEC-120 rue Paul Armangot, 94400 Vitry-sur-Seine.
Directeur de thèse : Samer MOHAMMED
Soutenance prévue le vendredi 19 janvier 2024 à 10h00
Lieu : 122 rue Paul Armangot, IUT de Créteil-Vitry, 94400, Vitry-sur-Seine
Salle : Amphi R&T (Amphithéâtre)
Composition du jury proposé
M. Samer MOHAMMED, Université Paris-Est Créteil Val de Marne Directeur de thèse
M. Antoine FERREIRA, INSA Centre Val de Loire (Laboratoire PRISME) Rapporteur
M. Eric MONACELLI, LISV lab, UVSQ, Univ. Paris Saclay Rapporteur
Mme Marie BABEL, IRISA, INRIA Rennes – Bretagne Atlantique Examinatrice
M. Yacine AMIRAT, Université Paris-Est Créteil Val de Marne Examinateur
Mme Samia NEFTI-MEZIANI, University of Birmingham Examinatrice
Résumé:
Cette thèse explore des stratégies de contrôle avancées en robotique portable, visant à aborder les divers défis de mobilité rencontrés par des personnes âgées ou des patients souffrant de pathologies neurologiques affectant leurs mouvements. Axé sur des objectifs à la fois d'assistance et de rééducation, le but principal est d'assister les activités physiques quotidiennes à travers des solutions sur mesure.
L'accent est mis sur le développement de systèmes qui non seulement fournissent une assistance physique, mais répondent également à l'intention du porteur en temps réel en s'adaptant à ses divers besoins.
Les principales contributions sont centrées autour de nouveaux paradigmes de contrôle pour une orthèse de cheville actionnée, des stratégies de modulation de l'impédance pour les exosquelettes des membres inférieurs utilisées dans les mouvements de transfert assis-debout. Ces contributions concernent également la détection en temps réel des modes de marche à l'aide d'algorithmes de type LSTM, et l'exploitation de la Stimulation Électrique Fonctionnelle Adaptative pour les personnes atteintes de foot drop. Ces avancées démontrent un potentiel significatif pour améliorer la mobilité, l'indépendance et la qualité de vie globale des personnes dépendantes utilisant ces dispositifs d'assistance. Des analyses théoriques, des simulations et des validations expérimentales démontrent l'efficacité des méthodologies proposées.
Koussaila Moulouel, doctorant de l’équipe SIRIUS soutiendra sa thèse le 19 Mai 2023 en Amphi RT, campus de Vitry-sur-Seine de l’UPEC-120 rue Paul Armangot, 94400 Vitry-sur-Seine.
Titre : Approches d'IA hybrides pour la reconnaissance du contexte : application à la reconnaissance et à l'anticipation d'activités, et à la gestion des anomalies de contexte dans les environnements d'Intelligence Ambiante
Directeur(s) de thèse : Yacine Amirat
Résumé:
Les systèmes d'intelligence ambiante/Ambient Intelligence (AmI) visent à fournir aux utilisateurs des services d'assistance destinés à améliorer leur qualité de vie en termes d'autonomie, de sécurité et de bien-être. La conception de systèmes AmI capables d'une reconnaissance précise, fine et cohérente du contexte spatial et/ou temporel de l'utilisateur, en tenant compte de l'incertitude et de l'observabilité partielle des environnements AmI, pose plusieurs défis pour permettre une meilleure adaptation des services d'assistance au contexte de l'utilisateur. L'objectif de cette thèse est de proposer un ensemble de contributions qui répondent à ces défis. Tout d'abord, une ontologie descriptive et narrative du contexte est proposée pour modéliser la connaissance contextuelle dans les environnements AmI. L'objectif de cette ontologie est la modélisation du contexte de l'utilisateur en prenant en compte les différents attributs du contexte et en définissant les axiomes du raisonnement de bon sens nécessaire pour déduire et mettre à jour le contexte de l'utilisateur. Contrairement aux ontologies de pointe, l'ontologie contextuelle proposée comprend (i) une TBox représentant l'ontologie centrale du domaine définie par des concepts et des relations, (ii) une ABox de formules propositionnelles correspondant à des instanciations d'attributs de contexte, et (iii) une RBox, représentée par un programme logique ASP, consistant en des modèles de règles, tels que la spécification des effets des événements, la spécification des événements déclenchés, l'agrégation des composants du contexte, et la planification des actions de détection et d'assistance. La TBox, l'ABox et la RBox constituent la base des cadres développés dans cette thèse et jouent un rôle crucial dans l'amélioration de la reconnaissance du contexte de l'utilisateur. La deuxième contribution est un cadre hybride basé sur une ontologie qui combine le raisonnement de bon sens probabiliste et la planification probabiliste pour reconnaître le contexte de l'utilisateur, en particulier les anomalies du contexte, et fournir des services d'assistance tenant compte du contexte, en présence d'incertitude et d'observabilité partielle des environnements. Ce cadre exploite les prédictions des attributs du contexte, à savoir l'activité et la localisation de l'utilisateur, fournies par des modèles d'apprentissage profond. Dans ce cadre, le raisonnement probabiliste de bon sens est basé sur l'ontologie de contexte proposée pour définir l'axiomatisation de l'inférence de contexte et de la planification en cas d'incertitude. La planification probabiliste est utilisée pour caractériser un contexte anormal en faisant face à l'incomplétude de la connaissance contextuelle due à l'observabilité partielle des environnements AmI. En outre, la planification probabiliste permet d'adapter les services d'assistance fournis à l'utilisateur en fonction de son contexte. Le cadre proposé a été évalué en utilisant des transformateurs et des modèles CNN-LSTM sur les jeux de données Orange4Home et SIMADL. Les résultats montrent l'efficacité du cadre pour reconnaître les contextes de l'utilisateur, en termes d'activité et de localisation de l'utilisateur, ainsi que les anomalies de contexte dans des environnements incertains et partiellement observables. Troisièmement, un cadre hybride combinant l'apprentissage profond et le raisonnement probabiliste pour anticiper les activités humaines sur la base de vidéos égocentriques est proposé. Le raisonnement de bon sens probabiliste exploité dans ce cadre est basé sur le raisonnement abductif pour anticiper les activités humaines atomiques et composites, et sur le raisonnement temporel pour saisir les changements d'attributs du contexte. Des modèles d'apprentissage profond, à savoir YOLOv5 et ResNet, ont été exploités pour reconnaître les attributs du contexte, tels que les objets, les mains humaines et les emplacements des personnes. L'ontologie du contexte est utilisée pour modéliser les relations entre les activités atomiques et les activités composites. L'évaluation du cadre montre sa capacité à anticiper les activités composites sur un horizon temporel de quelques minutes, contrairement aux approches de pointe qui ne peuvent anticiper les activités atomiques que sur un horizon temporel de quelques secondes. Il a également montré de bonnes performances en termes de précision de la classification des activités anticipées et de temps de calcul. Enfin, un cadre basé sur le raisonnement par flux est proposé pour anticiper les activités humaines atomiques et composites à partir de flux de données d'attributs contextuels collectés à la volée. Les modèles d'apprentissage profond YOLOv7 et ResNet ont été utilisés pour reconnaître les attributs contextuels, tels que les objets utilisés dans les activités, les mains et les emplacements des utilisateurs. Le système de raisonnement par flux effectue un raisonnement causal, abductif et temporel à l'aide des connaissances contextuelles obtenues en cours d'exécution. Des axiomes d'effets dynamiques ont été introduits pour anticiper les activités composites qui peuvent être soumises à des événements imprévus, tels que le saut d'une activité atomique et le retard d'une activité atomique. Le cadre proposé a été validé par des expériences menées dans un environnement de cuisine. La performance remarquablement élevée en termes de nombre d'anticipations d'activités montre la capacité du cadre à prendre en compte la connaissance contextuelle des épisodes passés nécessaire pour anticiper les activités composites. La performance en termes de temps d'inférence de la connaissance contextuelle indique que le cadre est adapté aux applications du monde réel.
Randa Mallat, doctorante de l’équipe SIRIUS soutiendra sa thèse le 2021-01-28 en Amphi RT, campus de Vitry-sur-Seine de l’UPEC-120 rue Paul Armangot, 94400 Vitry-sur-Seine.
Titre : Toward an affordable multi-modal motion capture system framework for human kinematics and kinetics assessment
Résumé:
La quantification des activités motrices humaines nécessite de mesurer et estimer, aussi précisément que possible, des variables cinématiques et dynamiques. L’analyse du mouvement humain possède une grande variété d’applications dans les domaines de la rééducation fonctionnelle, l’orthopédie, le sport, la robotique d’assistance, ou l’ergonomie industrielle. Les systèmes d’analyse de mouvement actuels font généralement référence à des systèmes stéréophotogrammétriques et à des plateformes de force de laboratoire qui sont précis mais également coûteux, nécessitant des compétences d'experts et ne sont pas portables. Récemment, l'utilisation de capteurs à bas coût pour l'estimation du mouvement humain, tels que les centrales inertielles et les caméras RGB, a fait l'objet de nombreuses études. Malgré leur grand potentiel d'utilisation en dehors du laboratoire, ces systèmes souffrent encore d'une précision limitée, principalement en raison de la dérive inhérente des centrales inertielles et des occlusions en cas de l’utilisation des caméras, ce qui fait que l’estimation précise de la cinématique et de la dynamique articulaire est encore difficile à garantir. Ces restrictions pourraient expliquer pourquoi de tels systèmes sont rarement utilisés dans des applications cliniques ou pour la rééducation à domicile. Dans ce contexte, cette thèse a pour objectif le développement d'un nouveau système d’analyse de mouvement à bas coût permettant l’estimation précise de l’état 3D des articulations humaines. Contrairement aux études précédentes basées sur des capteurs soient visuels soient inertiels, l'approche proposée porte sur la combinaison des données de capteurs visuels-inertiels nouvellement conçus. Le système utilise également de nouvelles méthodes pratiques de calibration ne nécessitant aucun équipement externe. Les données des capteurs sont combinées dans un filtre de Kalman étendu contraint prenant en considération la biomécanique du corps humain ainsi que les tâches réalisées pour améliorer l'estimation de la cinématique. Cela se fait en incorporant des contraintes de corps rigide, des butées articulaires, et en modélisant l'évolution temporelle des trajectoires articulaires ou de la dérive des centrales inertielles. La capacité du système à estimer la cinématique articulaire en 3D a été validée par l’analyse de plusieurs activités de la vie quotidienne du bras ainsi que l’analyse de la marche sur tapis roulant. Deux prototypes avec un nombre et des configurations de capteurs différents ont été étudiés. Les expériences menées avec plusieurs sujets sains ont montré des résultats très satisfaisants par rapport à un système stéréophotogrammétrique de référence. Dans l'ensemble, l’erreur quadratique moyenne obtenue est inférieure à 4 degrés. Ce système a également été utilisé pour l'identification des paramètres dynamiques des membres inférieurs d'un système humain-exosquelette. Un système d'évaluation a été proposé dans le but de sélectionner un modèle dynamique optimal du système humain-exosquelette qui soit le meilleur compromis entre la précision des couples articulaires estimés et la simplicité du modèle. Dans ce contexte, le système proposé vise à quantifier la contribution indépendante des paramètres cinématiques et dynamiques dans l'estimation du couple articulaire, ainsi que l'effet du mouvement relatif entre les axes articulaires de l’exosquelette et du porteur. Une évaluation a été réalisée sur une orthèse d'assistance de genou pendant des mouvements de flexion/extension. Les résultats ont conduit à la proposition d’un modèle minimal du système humain-orthèse.
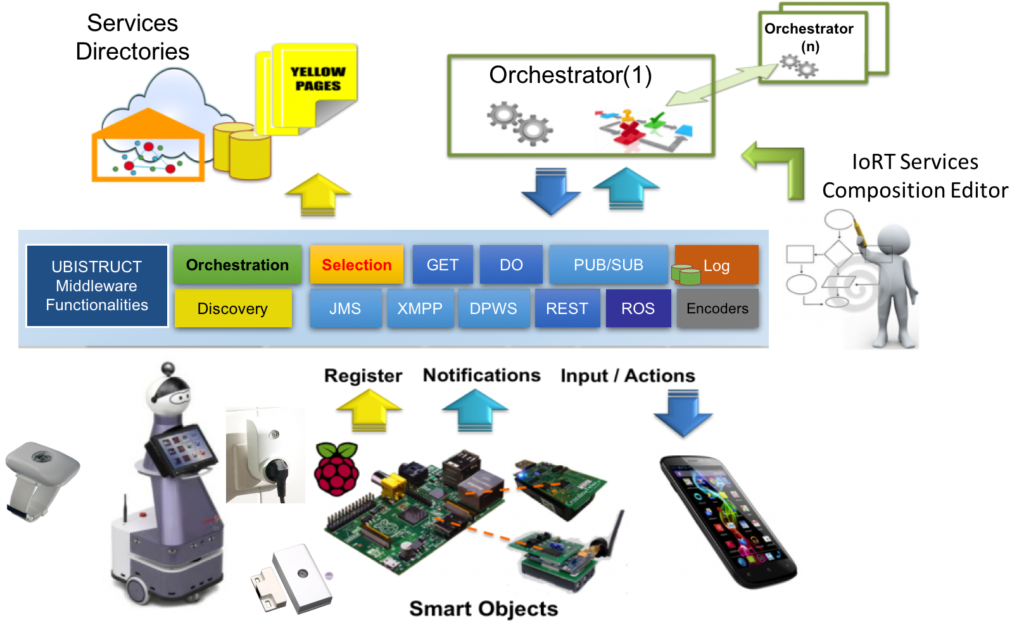
Ubistruct Orchestrator is a software integrated framework that enables designers to compose and run applications as composite services in an internet of robotic things environments (IoRT). The composition is done simply by using a web design tool. A composite service is executed by orchestration agents that are responsible of invoking IoRT services at the right time when a precondition is satisfied The execution of the composite services can be done according to one of the two following architectures: centralized or decentralized orchestration. In the first case, one single orchestration engine (Orchestrator) is responsible of invoking all the services defined in the composition plan whereas in the second case a set of orchestration engines are deployed. Every orchestrators run part of the global composition plan that is called sub-composition. The orchestrators works in cooperation, thanks to the Event reasoner, which evaluates the events that triggers a sub-composition.
In case your are interested to develop new algorithms for services composition, selection and orchestration and would like to integrate and validate them in our platform, please fill the contact form bellow
Contact Us
References:
N. Temglit, A. Chibani, K. Djouani, and M. A. Nacer, "A Distributed Agent-Based Approach for Optimal QoS Selection in Web of Object Choreography," IEEE Systems Journal, vol. 12, no. 2, pp. 1655 -1666, 2018. .
A. Yachir, Y. Amirat, A. Chibani, and N. Badache, "Service-Oriented, User-Centered and Event-Aware Framework for Ambient Intelligence and Internet of Things," IEEE Transactions on Automation Science and Engineering, vol. 13, no. 1, pp. 85-102, 2016. .
M. S. Khanouche, Y. Amirat, A. Chibani, M. Kerkar, and A. Yachir, "Energy-centered and QoS-aware services selection for Internet of Things," IEEE Transactions on Automation Science and Engineering, vol. 13, no. 3, pp. 1256-1269, 2016. .
A. Yachir, Y. Amirat, A. Chibani, and N. Badache, "Towards an Event-Aware Approach for Ubiquitous Computing based on Automatic Service Composition and Selection," Annals of Telecommunications, Springer, vol. 67, no. 7-8, pp. 341-353, 2012. .
K. Tari, Y. Amirat, A. Chibani, A. Yachir, and A. Mellouk, "Context-aware Dynamic Service Composition in Ubiquitous Environment," in Proc. Of the IEEE International Conference on Communications (ICC), Cape Town, South Africa, 2010, pp. 1-5. .
A. Yachir, Y. Amirat, K. Tari, and A. Chibani, "QoS Based Framework for Ubiquitous Robotic Services Composition," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2009, St. Louis, United States, 2009, pp. 2019 --2026. .
A. Yachir, K. Tari, A. Chibani, and Y. Amirat, "Toward an Automatic Approach for Ubiquitous Robotic Services Composition," in Proc. Of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2008, Nice, France, 2008, pp. 3717-3724. .
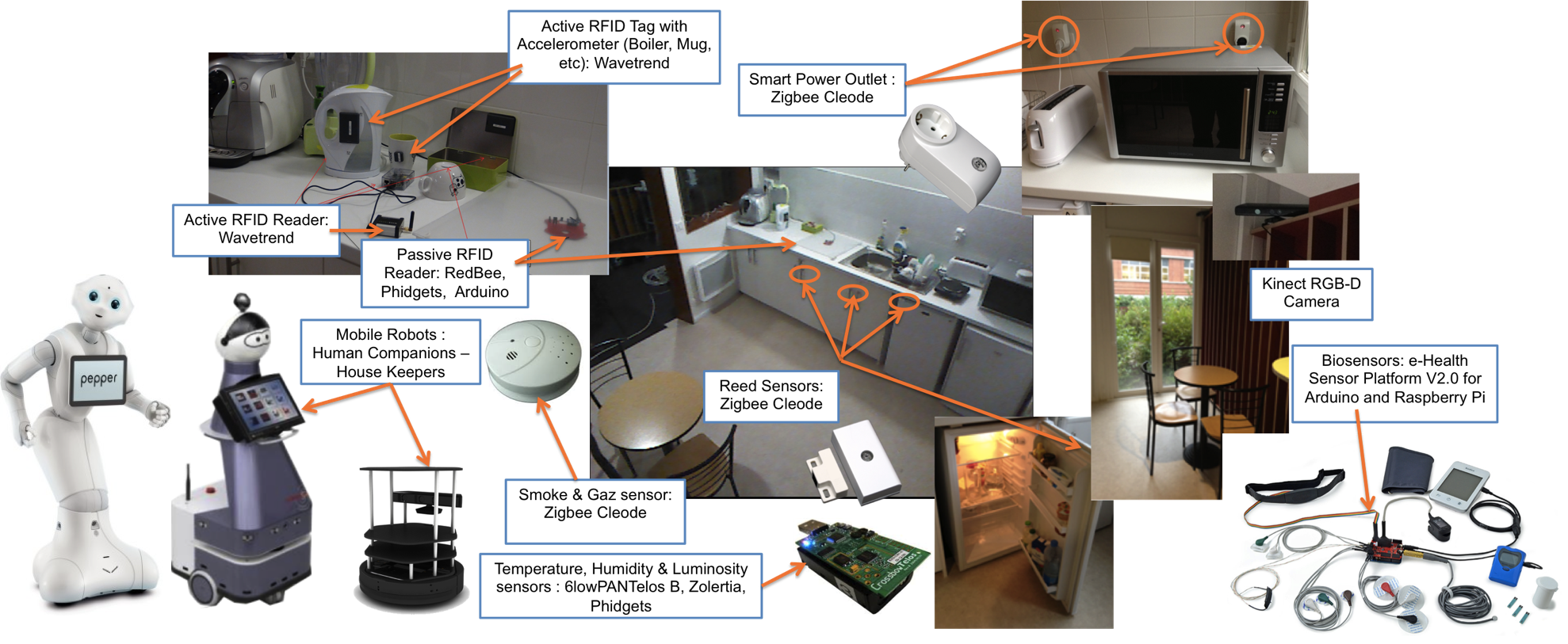
An experimental platform dedicated to the implementation of reasoning models and activity recognition algorithms and ambient user support services. Context awareness is of paramount importance and focusing on multi modal recognition of users' situations and activities. We use for that various sensing technologies and geo-positioning systems such as Kricket (Ultra sound combined with radio), Wifi Finger printing, RSSI based triangulation and trilateration with Zigbee or 6lowPan WSN or the new the newly bluetooth low energy, which is still under investigation.
In the living lab premisses are deployed more several wireless sensors and actuators networks that comply with the standards of the Internet of Things such as RFID, Bluetooth BLE, Zwave, Zigbee and 6lowpan. The living lab includes also geo-positioning systems based on Cricket and Ibeacon technologies. 7 mobile companion robots, compliant with ROS, are made available for applications designers and researchers including 4 Aldebaran SoftBank pepper robots, two Willow garage ROS Turtlebot robots and one Robosoft Kompai V1 robot.
In case your are interested to validate your research works in our experimentation facility or join our research and development teams, please fill the contact form bellow
Contact Us
References:
[1] F. Attal, Y. Amirat, A. Chibani, and S. Mohammed, "Automatic Recognition of Gait phases Using a Multiple Regression Hidden Markov Model," IEEE/ASME Transactions on Mechatronics, 2018. <10.1109/TMECH.2018.2836934>. .
[2] H. Abdelkawy, N. Ayari, A. Chibani, Y. Amirat, and F. Attal, "Deep HMResNet Model for Human Activity-Aware Robotic Systems," in Proc. of the AAAI 2018 Fall Symposium Series, Arlington, United States, Oct. 2018.
[3] H. Abdelkawy, S. Fiorini, A. Chibani, N. Ayari, and Y. Amirat, "Deep CNN and Probabilistic DL Reasoning for Contextual Affordances," in Proc. of the AAAI 2018 Fall Symposium Series, Arlington, United States, Oct. 2018. .
[4] F. Sebbak, S. Bouznad, F. Benhammadi, A. Chibani, and Y. Amirat, "Context Awareness in Uncertain Pervasive Computing and Sensors Environment," in Proc. Of the 21th International conference on information fusion, FUSION 2018, Cambridge, United Kingdom, Jul. 2018. .
[5] S. Bouznad, A. Chibani, Y. Amirat, L. Sabri, E. Prestes, F. Sebbak, and S. Fiorini, "Context-Aware Monitoring Agents for Ambient Assisted Living
Applications," in Proc. Of the 13th European Conference on Ambient Intelligence, AmI 2017, Malaga, Spain, 2017, pp. 225-240. .
[6] N. Ayari, A. Chibani, Y. Amirat, and E. Matson, "A Semantic Approach for Enhancing Assistive Services in ubiquitous robotics," Robotics and Autonomous Systems, Elsevier, vol. 75, pp. 17-27, 2016. .
[7] S. Bouznad, F. Sebbak, F. Benhammadi, Y. Amirat, and A. Chibani, "Generalized Fuzzy Soft Set Based Fusion Strategy for Activity Classification in Smart Home," in Proc. Of the IEEE International Conference on Fuzzy Systems, FUZZ-IEEE 2017, Naples, Italy, Jul. 2017, pp. 1-6. .
[8] S. Bouznad, F. Sebbak, F. Benhammadi, Y. Amirat, and A. Chibani, "Multi-observer Decision Making Approach Using Power Fuzzy Soft Sets," in Proc. Of the IEEE International Conference on Fuzzy Systems, FUZZ-IEEE 2017, Naples, Italy, Jul. 2017, pp. 1-6. .
[9] F. Sebbak, F. Benhammadi, S. Bouznad, A. Chibani, and Y. Amirat, "An Evidential Fusion Rule for Ambient Intelligence for Activity Recognition," in Proc. Of the 3rd International Conference on Belief Functions (BELIEF 2014),, Oxford, United Kingdom, 2014, pp. 356-364. .
[10] F. Sebbak, A. Chibani, Y. Amirat, A. Mokhtari, and F. Benhammadi, "An Evidential Fusion Approach for Activity Recognition in Ambient Intelligence Environments," Robotics and Autonomous Systems, vol. 61, no. 11, pp. 1235-1245, 2013. .
[11] F. Sebbak, F. Benhammadi, A. Mokhtari, A. Chibani, and Y. Amirat, "Evidence Combination Based on CSP Modeling," in Proc. Of the 16th International conference on information fusion, FUSION 2013, Istanbul, Turkey, 2013, pp. 1111-1118. .
[12] F. Sebbak, A. Chibani, Y. Amirat, A. Mokhtari, and F. Benhammadi, "An evidential fusion approach for activity recognition under uncertainty in ambient intelligence environments," in Proc. Of the 14th International conference on Ubiquitous Computing, UbiComp'12, Pittsburgh, United States, 2012, pp. 834-840. .
It is a platform for capturing and analyzing movement that is composed of:
- an inertial sensor measurement system (IMU) from Xsens composed of 9 MTi inertial sensors.
- 4 Optitrack infrared cameras and 2 RGB-Depth cameras (Kinect).
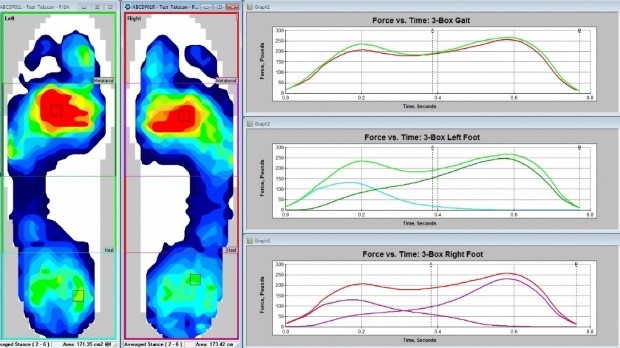
- the Tekscan F-Scan system providing dynamic pressure and force measurements at the feet operated for gait analysis.
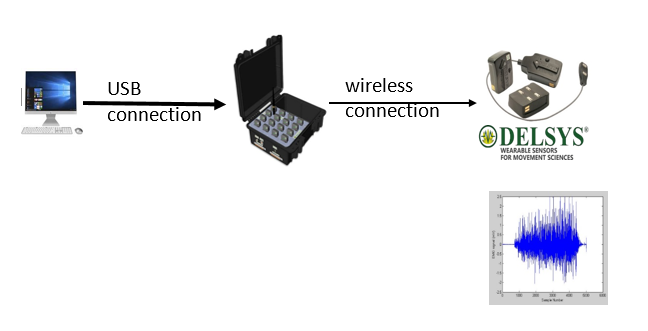
- the Delsys Trigno system, consisting of 15 EMG + IMU hybrid wireless sensors
The Xsens is a 3D motion tracker based on a inertial measurement unit, each sensor is connected to the XbusMaster who communicates to a wireless receiver (WR-A) by bluetooth. The WR-A is connected by usb to the computer.
Optitrack CamerasSubject wearing Xsens sensors
FSR (Force Sensitive Resistor)-TekScan
Is an “In-shoe systems” that provide detailed information about what is actually occurring inside the shoe. A Tekscan system consists of scanning electronics, software and thin-film sensor. Evaluating plantar pressure through the use of an in-shoe system helps provide a better understanding of foot function.
The Trigno Wireless EMG System is a high-performing device designed to make EMG signal detection reliable and easy. Each sensor is wirelessly connected to a central processing unit and this at the same time connected by USB to the PC.
The RehaStimTM (HASOMAED, Germany) eight channel biphasic noninvasive stimulator (see Figure.1, Figure.2) is used for Functional Electrical Stimulation (FES) which is defined as the generation of functional movements such as standing, walking, or grasping by means of a modulated electric current. The device allows an on-line regulation of the stimulation signal parameters that are: the frequency, the amplitude and the pulse-width.
Technical Details:
Current : 0……126 mA in 2mA step
Pulse-width : 0,20……… 500 µS
Frequency : 0, …… 70 Hz
Serial Ports : USB
Figure 1: Subject receiving stimulationFigure 2: RehaStim2, Stimulator and Electrodes
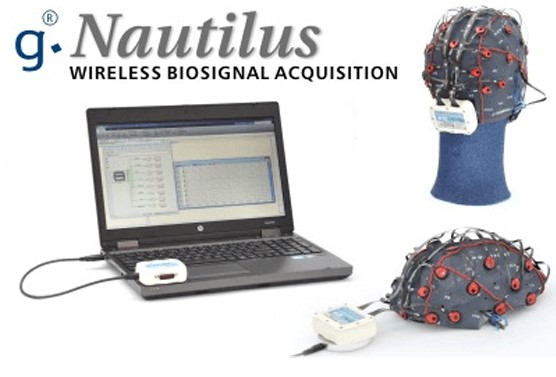
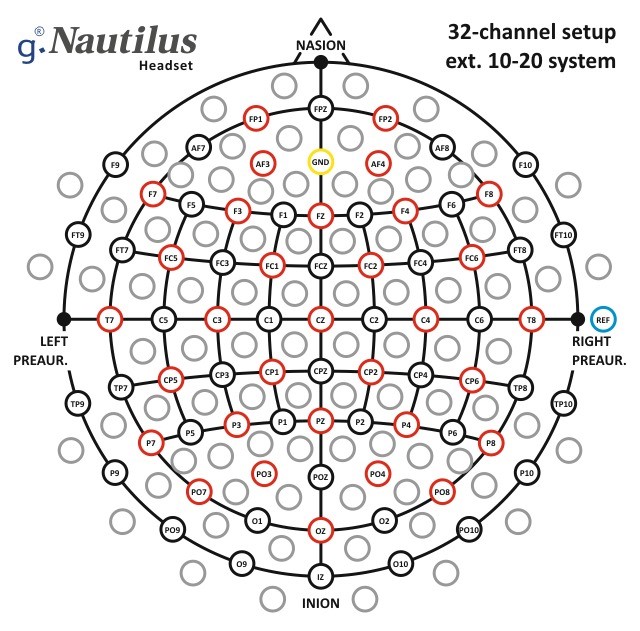
Beyond the technological prowess that represents the possibility of driving an object by thought, one of our main objective is to give the possibility to people with major disabilities to regain some autonomy. We use a Brain Computer Interface (BCI) to achieve this goal. The BCI is a system to communicate only by brain’s activity means. We use a g.Nautilus device developed by g.tec company (see Figure 2.1). This tiny and lightweight device is attached to EEG cap to avoid cable movements and to allow completely free movements. It is formed by 32 dry electrodes connected to a computer with wireless EEG kit. Figure 2.2 shows the location of the g.Nautilus’s electrodes.