

Prototypes and demonstrators
-

The Exoskeletal-Robotic Orthotics for Walking Assistance is designed to assist the mobility of dependant peoples such as incomplete paraplegic patients and the elderly. This exoskeleton consists of four parts: exoskeletal frames, sensor system, hardware control system, and a power unit.
-

ANGELEGS is a light wearable robot with nonresistant actuator technology. It is an improved version of the E-ROWA
-

The Exoskeleton Intelligently COmmunicating and Sensitive to Intention is designed to provide power assistance at the wearer’s knee joint level. The exoskeleton consists of two segments attached separately to the thigh and shank and fixed to the wearer’s leg using appropriate braces.
-

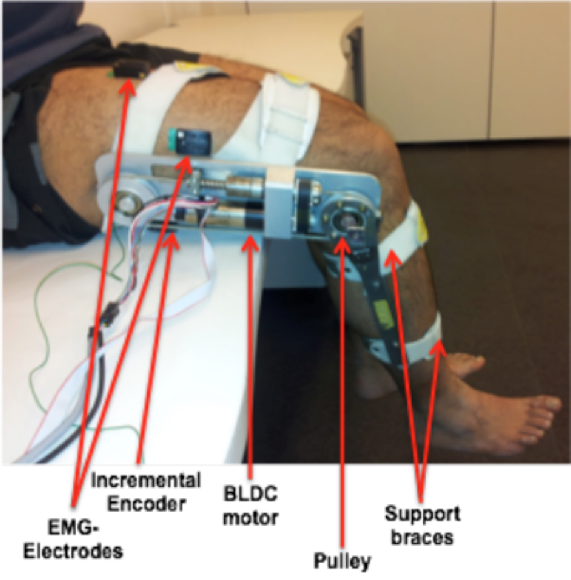
The Active Ankle Foot Orthosis (AAFO) is attached with straps to the subject’s left calf and thigh. The AAFO is equipped with an incremental encoder to measure the ankle joint angle.
-
This demonstrator shows a new approach to control a wearable knee joint exoskeleton driven through the wearer’s intention. A realistic bio-inspired musculoskeletal knee joint model is used to control the exoskeleton.
-

In this demostrator, a fast gait mode detection method based on a body sensor system is shown. A fuzzy logic algorithm is used to estimate the likelihoods of gait modes in real-time.
-

In this demonstrator, a model reference adaptive control with saturated proportional derivative (PD) action for an active ankle foot orthosis (AAFO) to assist the gait of paretic patients, is studied.
-
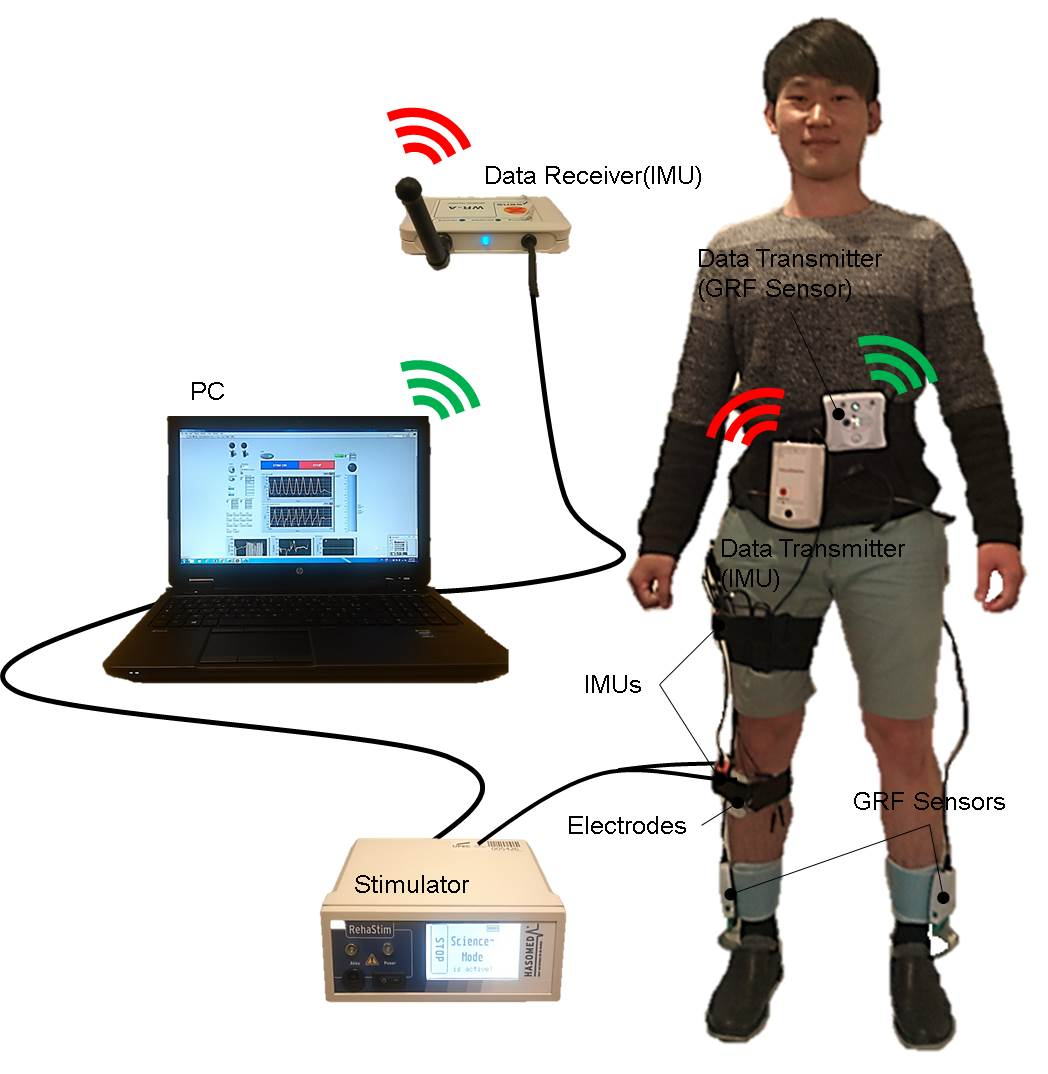
This demonstrator shows an adaptive knee-joint based Functional Electrical Stimulation (FES) method to correct the foot drop of paretic patients during swing phase.
-

This demonstrator shows a practical method to identify body segments inertial parameters of a human-exoskeleton system using affordable and easy-to-use sensors.
-

This demonstrator describes a cooperative control approach that combines the use of a powered knee joint orthosis along with Functional Electrical Stimulation (FES) for knee joint flexion extension movement restoration.
-

In this demonstrator of a bio-inspired perception, the concept of Artificial Visual Attention, inspired from the human’s visual mechanisms, is implemented and tested in the context of autonomous robotics. To carry out such a model, we have combined approaches relating the field of visual saliency, as well as several approaches and paradigms relating fields of object recognition, Machine-Learning, classification, etc
-
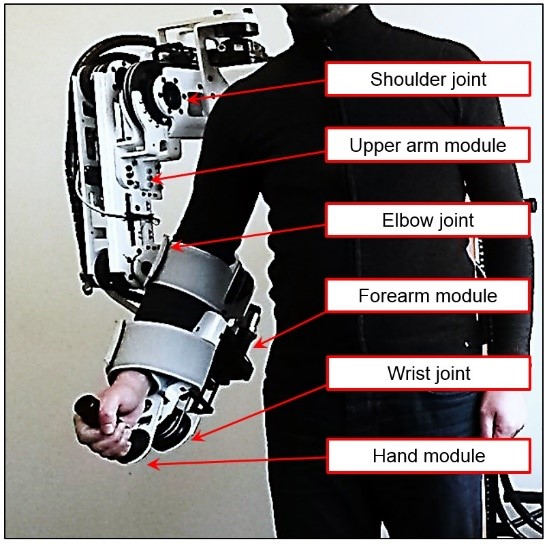
ULEL is a unique exoskeleton prototype developed by RB3D company especially for the LISSI laboratory. This exoskeleton is designed to perform scientific research on the rehabilitation of the human right arm.
-

This prototype demonstrates the benefits of a hybrid architecture composed of Deep Learning and Ontology based Probabilistic Reasoning mechanisms for Enabling ubiquitous robots with cognitive capabilities of recognising objects' affordances and users' Intentions.
-

It is a prototype of a context aware emotion recognition system that can be implemented in ubiquitous robots. It aims at demonstrating the hybrid reasoning architecture of the O-Smart NKRL platform that combines mechanisms for spatiotemporal reasoning and machine learning. The latter is used in this demo for the recognition of emotions by using an MLP neural network and decision engine implemented with possibilistic logics.
-

It is a demonstrator of a context aware human support system that can solve daily living issues. This demonstrator shows how an assistive agents endowed with natural language understanding and spatio temporal reasoning capabilities, can monitor human context, trigger context aware notifications for warning users and provide them answers by relying on the nearest experts
-

It is a demonstrator of an Ontology based reactive reasoning system that can monitor the situations of daily living. The demonstrator show the benefits of the Smart-rules framework in terms of facilitating the design of context aware monitoring agents by using only micro ontologies and production rules. The latter interact with standard façade layer connected to the different Devices and Robots.
-

It is a demonstrator of an ambient assisted living system for monitoring safety of the elderly. The scenario shows the ability of the Cerebro reasoning platform to detect conflicts between activities that could lead to situations that are dangerous for the user's safety.